Sysmacstudio欧姆龙NX控制器与电机驱动EtherCAT 点击:2321 | 回复:0

Sysmac studio 欧姆龙NX控制器与电机驱动 EtherCAT
0. 前言
1. 实际硬件连接
2. Sysmac studio 配置
2.1 新建工程
2.2 通信设置
2.2.1 软件内通信设置
2.2.2 上位机本地通信设置
2.3 硬件配置
2.3.1 控制器配置
导入实际控制器框架
建立控制器变量
2.3.2 电机配置
导入电机
轴基本设置
单位换算设置
操作设置
3. 重启报错处理
4. 小结
0. 前言
笔者最近需要使用到欧姆龙的多轴运动控制器来控制电机运动,但网路上关于Sysmac studio的教程或文章较为零散,作为初学者的笔者难以消化,故在稍微会用软件后撰写本文,为自己留个笔记,同时希望能够帮助到需要的人。
1.本文面向买了欧姆龙控制器与电机,装上Sysmac Studio软件却不会用、不熟悉大部分操作的人,小白适用。
2.本文教学内容所用的硬件如下:
一台能使用Sysmac studio的上位机
欧姆龙运动控制器一台:NX102-9000 (硬件版本:1.42)
伺服电机一台:零差云控机器人关节80I
控制器电源:24VDC
电机驱动器电源:根据电机而定,本文使用的电机输入电压为48VDC
3.本文的任务目标为:使用欧姆龙控制器,通过Sysmac studio编程对一伺服电机进行简单的位置控制。
4.本人水平有限,若有错误与建议还请多加指教,谢谢。
1. 实际硬件连接
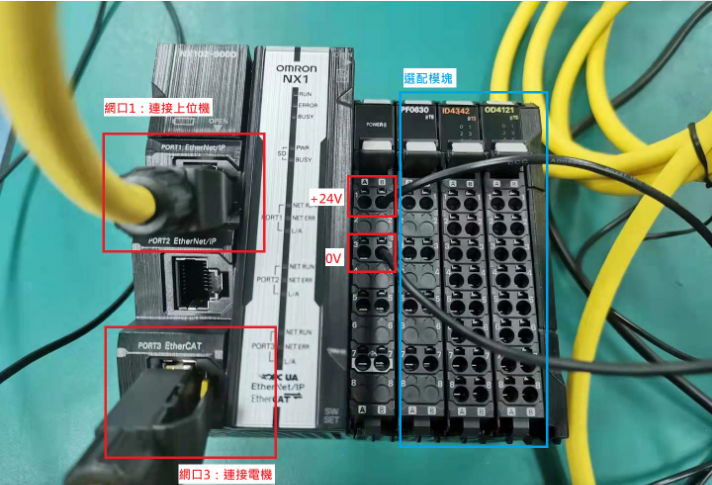
下图为NX102-9000控制器的硬件连接图,连接上非常简单:
网口1:使用EtherNet/IP通信,连接到上位机网口
网口3:使用EtherCAT通信,连接到电机接口
电源模块:本控制器输入电压为24VDC,按照说明书接到指定端口就行
以上三个部分接上就可以准备进行调试了,控制器右方为控制器的3个选配模块,由于NX102-9000本体没有I/O接口,所以需要选配数字输入/输出与I/O供电模块才能与传感器搭配使用,不过这部分本文用不到,可以无视。
2. Sysmac studio 配置
2.1 新建工程
对一个使用陌生软件的小白如我来说,第一步肯定是从创建工程/项目开始,名称、作者、注释都可以随意设置,下方的设备根据实际的控制器进行选择,本文使用的是NX102-9000,硬件版本1.42的控制器。
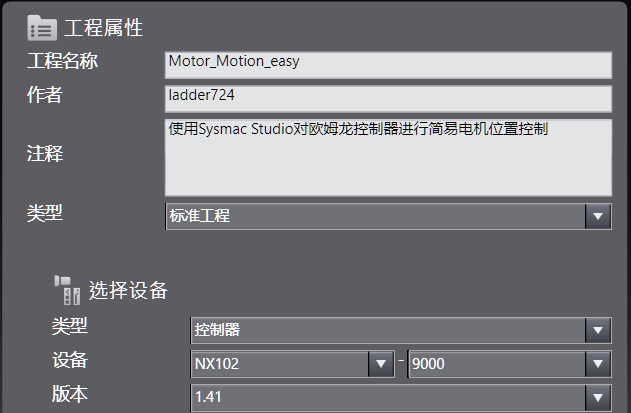
然而笔者使用的Sysmac studio软件较旧,设备中控制器版本最高只到能选到1.41,这部分没有关系,就算软件的设备版本落后于实际硬件版本也能正常使用控制器功能。此外,若选错或控制器不只一台也没关系,可以在创建工程后于左方菜单中修改或添加新设备。
2.2 通信设置
2.2.1 软件内通信设置
创建了新的工程后,首先应该先进行上位机与控制器的通信设置,确保两者是可以通过以太网进行交互与调试的:
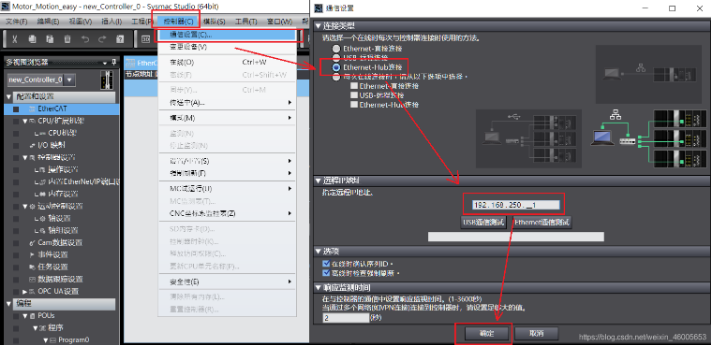
(1) 从软件上方菜单中找到「控制器 → 通信设置」
(2) 连接类型上选择「Ethernet-Hub连接」,尽管控制器与上位机是使用网线直接相连的,但是这款控制器内部就是要选这一项
(3) 指定远程IP地址,默认为192.168.250.1(PLC的本体的目前IP,如果需要修改PLC的IP,先不要改软件的IP,要先在线后,才能修改IP)
*当PLC的IP设置好后,可以测试下是否成功
(4) 点击「确定」,完成通信设置
若控制器有多个网口,则其他网口的IP地址会不一样,具体可以在左侧菜单「控制器设置→ 内置EtherNet/IP端口设置」中查看IP地址与子网掩码,下一步会用到
2.2.2 上位机本地通信设置
为了让上位机与控制器能够通信,必须让两者在同一个局部网络下,因此上位机本地也需要更改IP。
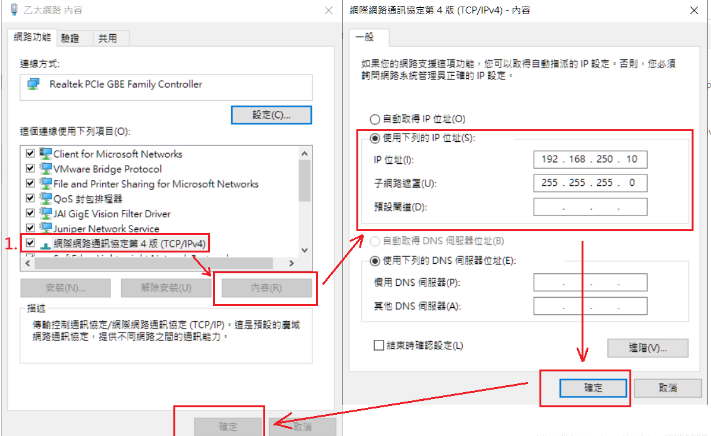
(1) 在上位机的「设定 → 网路和网际网络 → 变更介面卡选项」中找到你的以太网路,右键后选取内容(或称为属性)
(2) 选择「网际网路通讯协定第4版(TCP/IPv4) → 内容」
(3) 选择「使用下列的IP地址」并填上IP位址与子网路遮罩,IP地址的前9位需要与上一步软件中填写的远程IP地址一样,最后两位只要不和远程IP地址一样,随意写就行,本例为10;子网路遮罩用预设的255.255.255.0就行
(4) 完成后「确认 → 确认」退出,完成本地设置,可以回Sysmac studio了
2.3 硬件配置
2.3.1 控制器配置
导入实际控制器框架
完成通信设置后,现在上位机应该能够与控制器通信了
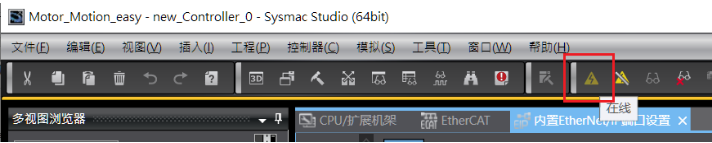
(1) 点选上方工具列的「在线」,让上位机与控制器实时连接,成功后会像下图一样有一条橘黄色的线出现,代表通信成功,接着准备配置控制器模块
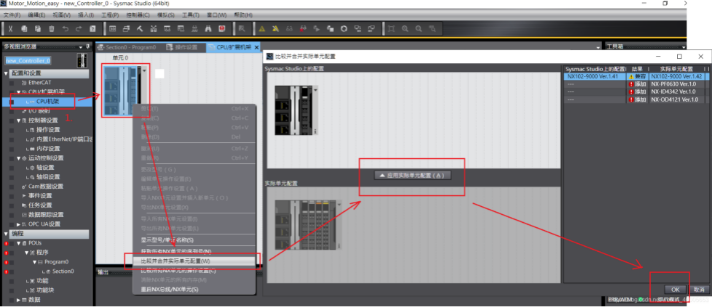
(2) 从左侧菜单中找到「CPU/扩展机架 → CPU机架」双击,你会看到一开始设置的控制器本体
(3) 右键控制器然后点击「比较并合并实际单元配置」,系统就会自动搜寻你的控制器模块的配置,点击「应用实际单元配置→ 是」之后点选右下方的OK就完成了设备配置,点击「离线」(位于「在线」的旁边) 准备進行下一步
建立控制器变量
在控制器控制电机的使用过程中,常常需要通过I/O接口来读取传感器信号,因此也要在软件中配置相关变量以供读取或发送信号。
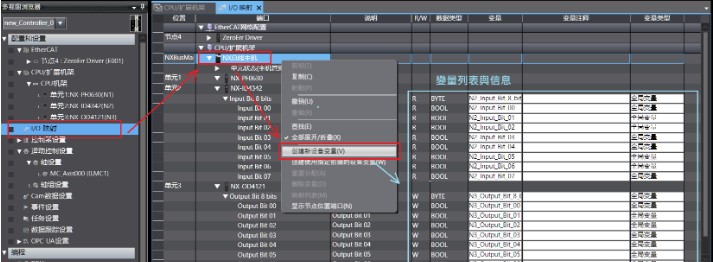
(4) 从左侧菜单中找到「I/O映射」并双击进入,你会看见网络配置与控制器架构信息
(5) 在控制器主机上右键选择「创建新设备变量」,然后软件会根据你的硬件生成并列出可以使用的变量。在本例中所使用的控制器本体是没有I/O接口的,因此选配了具有8个数字输入与8个数字输出的模块,在建立完变量后就可以看见有8个输入与8个输出变量
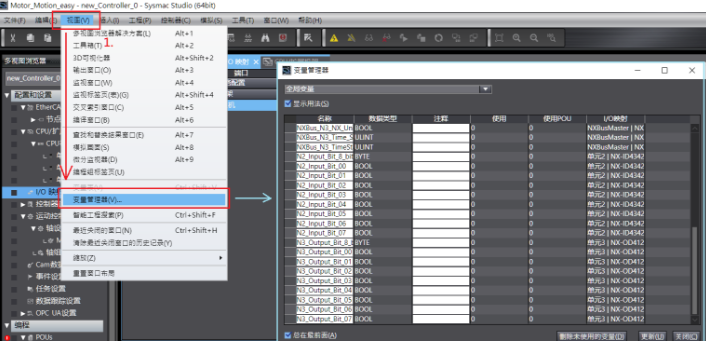
若在创建完变量后列表信息不完整,也可以通过软件上方菜单找到「视图 → 变量管理器」中查看并更改变量信息,像是名称、类型和注释
变量本身也分为「全局变量」与「本地变量」,前者占用控制器内存,通常用于接收发送外部设备的信息;后者通常是只在软件编程时于内部使用的信息,不占内存,关于两者详细的差异与用法可以参考其他文章,本文目标着重于让一个电机动起来,不细说此部分。可以修改前缀,后缀,Input_Bit_00这一个是不变的,要改的话需要一个一个改,不能直接EXCEL复制
2.3.2 电机配置 关注wei信公众号-老王工控笔记
导入电机
配置完控制器后,接着配置电机的相关文件与参数
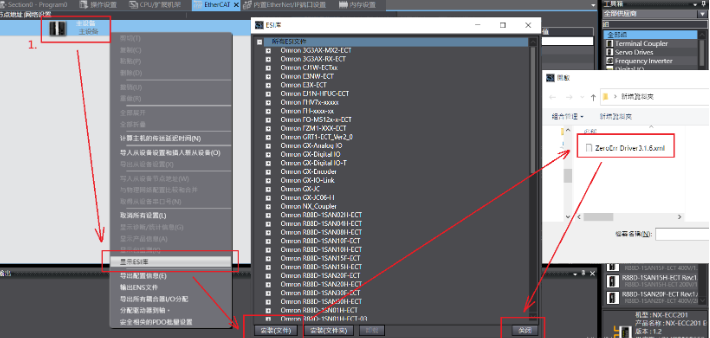
(1) 从左侧菜单中找到「EtherCAT」双击,你会看见稍早设置的主设备
(2) 右键主设备点选「显示ESI库」,点左下方「安装(文件)」,选择电机驱动器的.xml配置文件,完成后清单中会出现你的电机驱动器,然后关闭ESI库窗口。一般来说电机驱动器的配置文件只要确认好通信方式,都可以向电机供应商要到对应的.xml档案,本文中电机使用EtherCAT通信
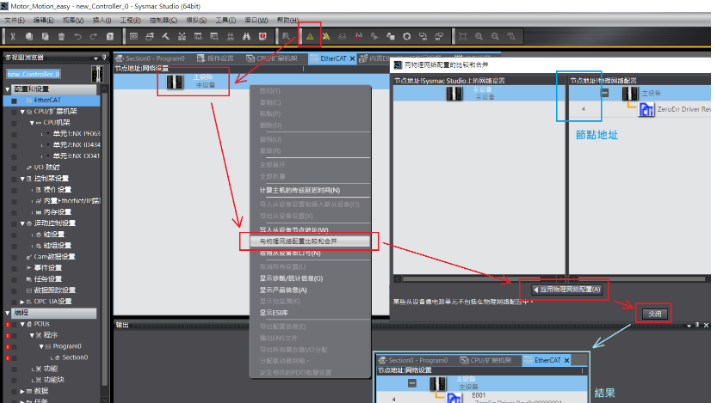
(3) 点击「在线」与控制器连接,右键主设备点选「与物理网络配置比较与合并」,窗口右方是软件识别出的硬件配置,点击下方的「应用物理网络配置」将实际硬件配置同步到Sysmac studio中,完成后关闭视窗就可以看见设备中已经识别并连接了电机,接着要建立电机的轴配置。
关注wei信公众号-老王工控笔记
该注意的是电机驱动器的左侧会有「节点地址」,这个相当于电机的编号,若你的系统中有多个电机,每个电机分配到的节点地址会不一样。
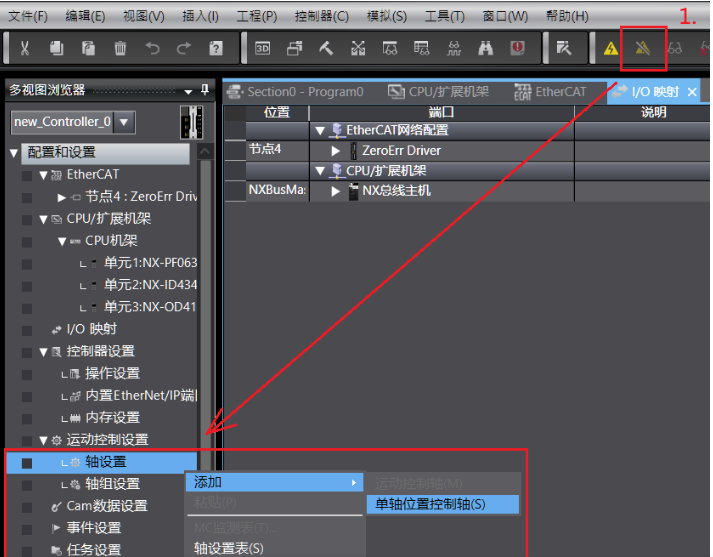
(4) 点击「离线」断开控制器连接,进入左侧菜单找到「运动控制设置→ 轴设置右键→ 添加→ 单轴位置控制轴」,即可生成电机的控制轴,双击新增的轴进入设置页面,主要有3个页面需要设置。
轴基本设置
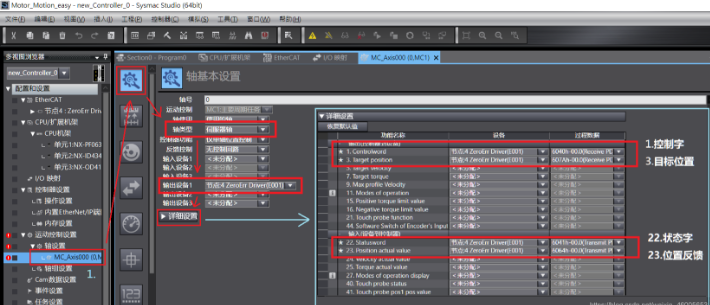
(5) 本例中使用的是伺服电机,因此在「轴类型」当中选择「伺服器轴」,「输出设备1」则根据节点地址选择正确的电机
(6) 设置完上方两项后点开下面的「详细设置」,进行控制器与电机之间的PDO映射关系,对于非欧姆龙自家的电机来说此步骤不可或缺。
若要进行电机位置闭环控制,基本需要设置4项,分别是控制字(Controlword)、目标位置(Target position)、状态字(Statusword)与位置反馈(Position actual value)。
不懂什么是PDO映射也没关系,但要知道这个映射是国际标准,一般只要.xml文件要对了基本都能配上。
配置的方法很简单,先在「设备」中根据节点选择正确的电机,然后在「过程数据」中选择与「功能名称」有一样名字的选项即可,例如在控制字(Controlword)选项中,数据要选择6040h-00.0(Receive PDO mapping 0_Control word_6040_00),其他三项依此类推。

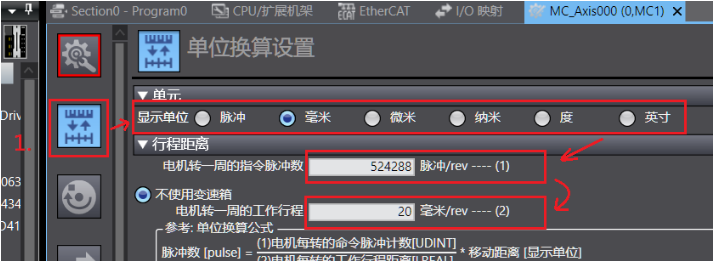
单位换算设置
(7) 点选左侧菜单的第二个页面「单位换算设置」,最上方的「显示单位」根据电机具体的应用场景设置,笔者需要将电机接在滚珠丝杠上让其进行直线运动,因此单位设为毫米对我来说比较方便。
(8) 在行程距离中根据电机编码器的参数来设置「电机转一周的指令脉冲数」,本例所使用的电机编码器为19位,也就是说让电机转一圈需要524288个脉冲信号(219),不确定的话可以问一下电机供应商
(9) 下方的「电机转一周的工作行程」也根据实际应用例填上,本例中填上的是导轨丝杠的行程20mm
如果只是想先调试让电机动起来的话可以将单位设置成「角度」,然后在行程度填上360即可(设定电机所谓「转一周」就是旋转360度)
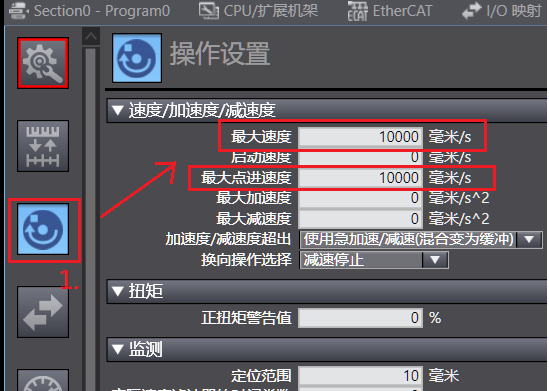
操作设置
(10) 进入左侧菜单第三个页面「操作设置」,设置「最大速度」与「最大点进速度」这两项,若预设数值不报错的话可以直接用,报错的话需要更改,数值可以大一点没关系,若超过电机本身性能就只是让电机以最大速度移动而已,但是要注意设定过大的话软件会报错,调小一点即可。
3. 重启报错处理
当你用控制器配置完电机参数后,若下次上电时没有连接电机,则可能会在连接电机的网口处闪报错灯(以本控制器为例,接电机的网口是控制器上的Port 3 ),这是因为你在软件中配置了电机的相关参数,而控制器因为没连接电机而找不到相关信息所导致的错误。
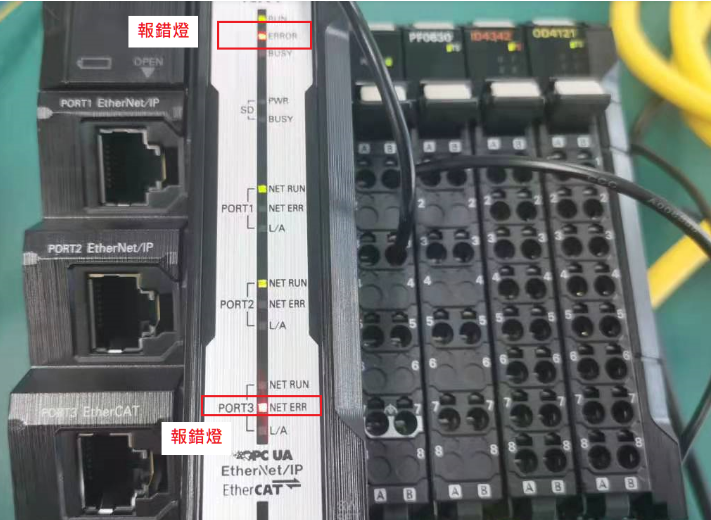
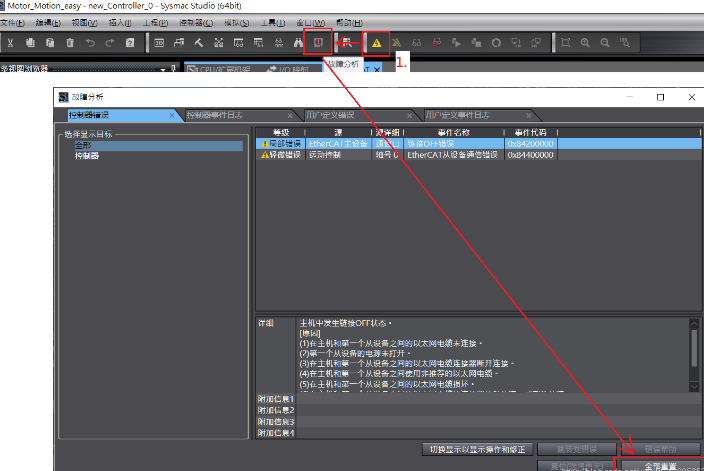
在此情况下接上电机后,报错并不会主动消失,此时需要在Sysmac studio中让上位机与控制器「在线」连接,然后点击上方工具列中的「故障分析」,在故障分析中能查看控制器内部的报错情况,如果是上述的情况,则可以直接点击右下角的「全部重置」让控制器刷新状态,顺利的话几秒后错误信息就会清空,控制器上的报错灯也会熄灭,就可以正常使用控制器了。
关注wei信公众号-老王工控笔记

————————————————





楼主最近还看过
- 提供松下电工资料
 [3536]
[3536] - 免费工业控制仪器仪表控件[9591]
- 史上最完整的PID应用资料集[3552]
- 求iai公司的x-sel说明书[4253]
- 在欧洲CE认证标准中导线颜色...[2670]
- 安川系列伺服调试软件[2445]
- 需要交流自动化资料的看这里[7017]
- 日本KOGANEI(小金井)资料免费...[2865]
- SWXCF文件是什么文件?用什么...[6432]
- IEEE的免费英文论文下载,你知...[10295]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
