用高速摄影机分析掘进机截齿轨迹和刀盘振动------TEMAMotion3D 点击:2440 | 回复:0

为了识别掘进机刀盘采煤过程中截齿的行为,采用了光学系统。该系统的主要部件是高速摄像机。结合TEMA Motion 3D软件(设计用于根据视频中注册的图像分析运动),可以在切割过程中详细分析动臂、刀盘和截齿的轨迹。本文介绍了测量过程,并对所选切削类型:渐进式和递减式的刀盘上截齿的动臂振动和运动轨迹进行了比较分析。
1、 介绍
从多截齿刀盘的角度来看,截齿瞬时位置的确定是将它们与产生的力联系起来的关键在采矿过程中。取决于刀盘和动臂伸出速度,连续进入切割区的截齿可以制造新的切割或掉入前一个截齿造成的凹槽[1]。此外,这些参数的修改影响切割[2–6]。某工程的荷载特性分析拾取(这是验证数值所必需的掘进机型号[7–10]和自动在采矿过程中控制机器的参数[11] )需要识别截齿的运动轨迹,压缩和侧向力的测量)和掘进机振动(尤其是掘进时的振动系统组件)。使用外部光学元件高速摄像机系统(不属于部件)精确到足以定义刀盘的位置变化拾取是直接测量的替代方法[12] 。考虑到复杂的运动横向刀盘的轨迹(其中拾取在圆环曲面上以螺旋运动方式移动在切割过程中臂架和整体的重叠振动)使用光学测量系统确定动臂上选定点的位移掘进机刀盘已经证明正确的解决方案。
2、 测试
测量是在一个试验站进行的[13] 在采矿机械化系,以及西里西亚理工大学采矿和地质系的机器人化;本站作为“控制运动”的一部分降低掘进机刀盘能耗的研究动荷载研究项目公司--由NCBiR(国家研究中心)资助以及研究)。
为了进行光学测量刀盘的运动,试验台必须另外准备(图1)。其中之一图像分析的基本要求是拍摄,用于定位坐标的固定参考点空间中的系统,同时与物体一起移动。测量方法要求这些参考点位于同一位置飞机。考虑到工作条件站,是满足这些要求的唯一解决方案,就是用象限标记把一块板固定在混凝土上阻止。这块板放在计划的上面削减。

图1。光学测量元件布置图测试站系统:
1个像头;2个摄像头操作站;3-照明;4-掘进机;5–混凝土砌块
进行分析所需的另一个条件物体在三维空间中的运动是同时发生的两次同步拍摄,相对于拍摄对象放置的摄影机光轴之间的夹角,在该测量方法定义的范围内。因此,摄像机被放置在三脚架上在测试站两侧尽可能远的分开。
和摄像机部署一样重要测试站周围有适当的照明。拍摄时间超短视频帧需要一个非常明亮和稳定的来源照明(不脉冲)。用于测试照明车站,使用了特殊的LED面板。他们是放置在矿井巷道支护的圆弧上,每个面板发出的光束以使光线集中在测量地点。获得的光功率使我们能够以1000赫兹的频率注册视频,只有一个视频帧的曝光时间2×10–5秒。需要如此短的暴露时间
避免弄脏(因拍摄对象而变得模糊移动)在注册的视频中。
测试站周围的摄像机部署使用合适的镜头让我们可以两个摄像头的区域相同,包括末端
右刀盘、右刀盘有标记的板,中间的切割区域部分混凝土块工作面,大约1.5 m宽(图2)。
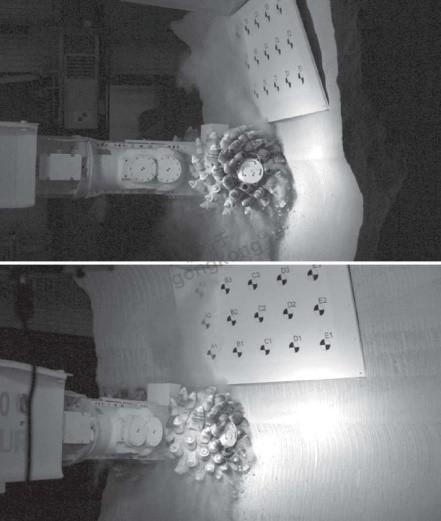
图2。右侧拍摄区域视图(a)左(b)个摄像头在采矿试验站
以识别刀盘的运动砰,这些东西也必须装备好用记号笔来改变它们的位置可以在以后的分析中明确确定。为了确定动臂位置的变化,减速齿轮上有两个标记刀盘传动盖。鉴于,为了确定刀盘的运动轨迹,它的侧盖上使用了三个标记,因为事实上,刀盘也执行旋转移动。
混凝土块的开采过程是在准备好的测试站拍摄,拍摄时间为5秒(这是内存的最大时间
在高速摄影机上)。这段时间,取决于关于刀盘的转速,使我们能记录三到五次完整的旋转刀头的。
3、 测量数据处理
运动分析采用使用TEMA运动3D软件。这包括基准上标记位置的确定注册图像中的板坯、吊杆和刀以及空间坐标系的确定两个摄像头都有共同点,镜头畸变校正系数(为了
消除图像的曲率),以及跟踪标记位置(图3)在连续注册视频的帧。
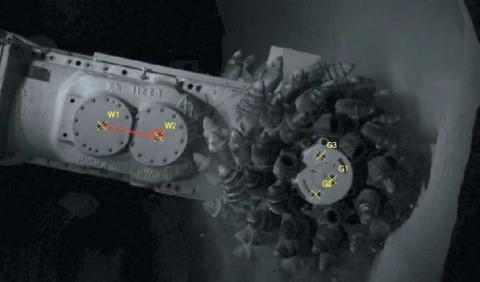
图3。从软件界面分析框架TEMA Motion 3D图像-虚拟跟踪点在动臂和刀盘处
根据执行的程序,x,y,和参考上标记的z坐标板坯和刀盘(图4)以及动臂上得到,反映了他们的连续位置他们的运动轨迹。
确定刀盘运动轨迹导出了TEMA Motion 3D软件。后来,它们与点的坐标匹配确定了虚拟环境下截齿的布置方式刀盘的三维模型扫描仪。坐标的相互关系刀盘模型与刀盘系统,运动轨迹让我们可以确定刀盘截齿的运动轨迹。
最后,确定了所有运动轨迹关于笛卡尔坐标系混凝土砌块。系统的中心位于在块的右下角。“y”轴被直接插入混凝土块,而“xz”平面与混凝土砌块的平面重叠掘进机的刀盘“z”轴垂直指向。


图4。刀盘标记的运动轨迹进行一次切割时 图5。标志物的运动轨迹动臂上和刀盘上的三个截齿进行一次切割时
运动轨迹示例掘进机臂架上的标记三个叶片的运动轨迹选择的截齿如图5所示。
在动臂运动分析过程中测量误差值的确定基于臂架上W1点和W2点测量位置的时间函数
它们之间的距离(图6)。
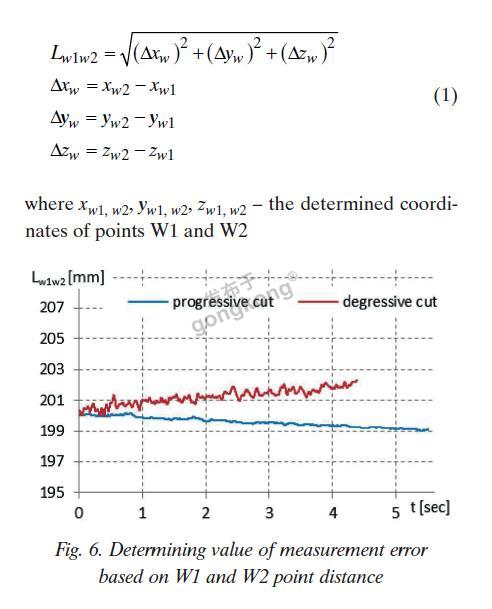
动臂上的标记之间的距离为200毫米。在使用光学元件移动动臂相机系统,改变了2毫米,这意味着测量误差为1 %。错误主要是由灰尘引起的振动测量所在建筑物的结构在测定过程中出现错误镜头畸变校正。因为事实上确定了刀盘的空间位置根据W1和W2的位置进行分析点,分析的结果在此呈现文章也受到类似错误的影响。
4、 截齿运动轨迹与臂架振动
本文介绍了掘进机臂架振动分析与运动刀盘截齿的运动轨迹用刀盘进行渐进和递减切削时转速44.8 rpm。
渐进式切削是指切削深度逐渐增加-通常从一个值开始零。如果掘进机配备有横向刀盘,通常是制造出来的水平开采工作面时岩石开挖时吊杆的运动低于先前存在的缺口(图7)。由于这些切口相对于上一个切口的位置切,也叫下切。
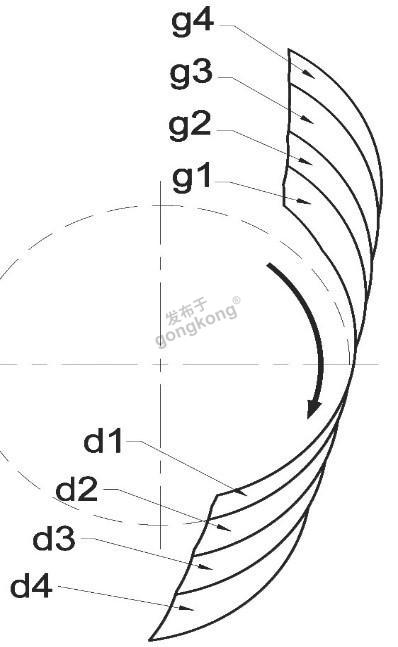
图7。横向连续切割掘进机刀盘:d—下(前进),g–上部(递减)
同时在平面上平行延伸吊杆对于大腿,横向刀盘上的镐理论上在表面上作螺旋运动托鲁斯。但是,由于采矿过程引起的繁荣,这些轨迹扭曲;这反过来导致切口的理论和实际形状[14]。图8显示了确定的实际运动轨迹坐标系中的三个拾取与“x”轴匹配的刀盘理论刀盘旋转轴。图形中的虚线形成圆形,这些圆是所选截齿理论运动轨迹的投影。对于当前的拾取移动轨道,偏离“y”轴明显小于“z”轴方向。
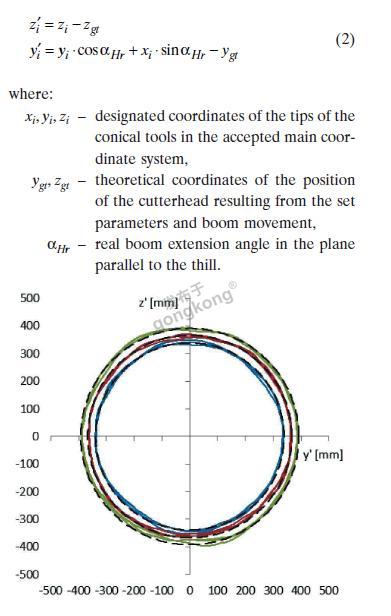
图8。刀盘振动引起的截齿实际运动轨迹与理论轨迹的偏差,
在垂直于刀盘旋转轴的平面上出现
根据截齿的运动轨迹确定动臂及其刀盘的振动很困难,因为它们相对于刀盘旋转轴旋转运动。这就是为什么刀盘的振动分析是基于吊臂主体上的参考点进行的。
刀盘相对于其理论位置的合成位置受整个机身振动和与机身相关的动臂振动的影响(在垂直和平行于薄板的平面上,动臂伸出角度的瞬时变化)。视频帧的区域允许我们确定起重臂的扭转振动以及采矿过程中产生的刀盘振动。
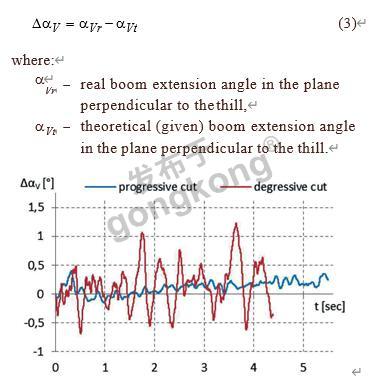
图9。吊杆在垂直于薄板的平面内延伸角的变化过程到理论位置
从所呈现的特征来看,当进行递减切削时,在垂直于薄壁的平面上,吊杆的角位移幅度甚至比渐进切削高3.5倍。在递减切削的情况下,它达到1.7°,而对于渐进切削–最高0.5°。振动引起的动臂α角位移对刀盘的实际位置有很大影响。对于所分析的掘进机类型,将角度α改变1°,会导致刀盘在垂直于薄板的平面内位移54 mm。
当开采水平层时,垂直于thillα的平面上的吊杆延伸角度理论上保持不变;但是,平行于thillα的平面上的吊杆伸展角度发生变化,这是掘进机转盘移动的结果。在所给出的示例中,吊杆在平行于薄板的平面上延伸,递减切削的平均角速度为=0.06 rad/sec,渐进切削的平均角速度为H=0.04 rad/sec(图10)。
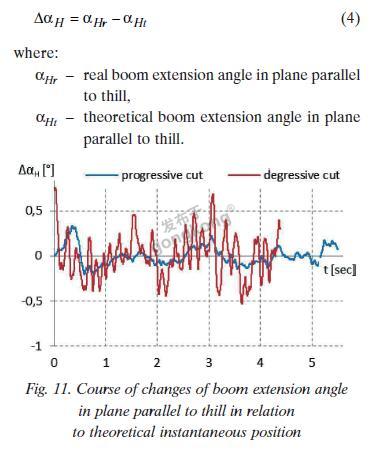

图10。平行于大腿平面上吊杆伸出角的变化过程 图11
为了分析延伸角H、 理论瞬时值由于转台的运动,作为参考点,并被赋予一个值0°(图11)。
对于递减切削,延伸角α的变化幅度达到1.2°,对于渐进切削,延伸角变化幅度达到0.5°。类似地,与垂直面振动和水平面振动一样,进行递减切削时,延伸角α的变化比渐进切削时大得多。这一差距几乎高出2.5倍。从引导刀盘的角度来看,重要的事实是,研究用掘进机的延伸角α变化1°,导致切割头在平行于薄板的平面上移动56.5–66.8 mm,具体取决于角度αV的假设值。
吊杆的扭转振动如
图9和图11显著影响了刀盘在空间中相对于理论位置的实际位置。
分别分析了与加工混凝土块相关的主笛卡尔坐标系各轴的刀盘位移瞬时结果。
在垂直方向(“z”轴)上,观察到刀盘位置的最大位移(图12)。这些位移的振幅达到了58毫米。对于同一方向,渐进切削的位移振幅最大值为30 mm;但是,仅在记录过程开始时(测量时为0.3 s)观察到这一点。之后,位移的振幅保持在15毫米的水平。
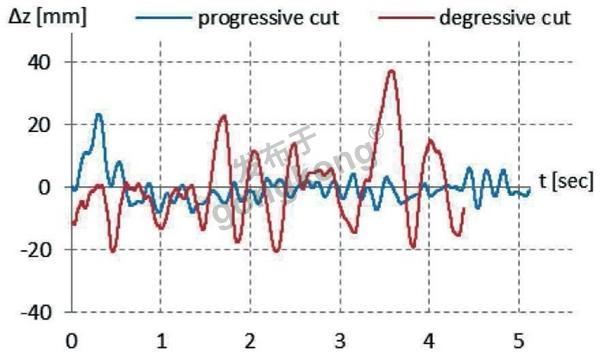
图12。刀盘位置沿垂直于薄板的“z”轴的变化过程至理论瞬时位置
这与刀盘沿“x”轴的位置变化有很大不同。对于渐进式和递减式切削,刀盘与理论位置的偏差都是显著的(图13)。在前一种情况下,变化幅度高达30毫米,而在后一种情况下,则高达50毫米。在这些情况下,刀盘位置沿“x”轴的主要变化周期相似或近似等于刀头的旋转周期。在“y”轴方向(即掘进机纵轴)观察到渐进式和递减式切削的最小位移(图14)。
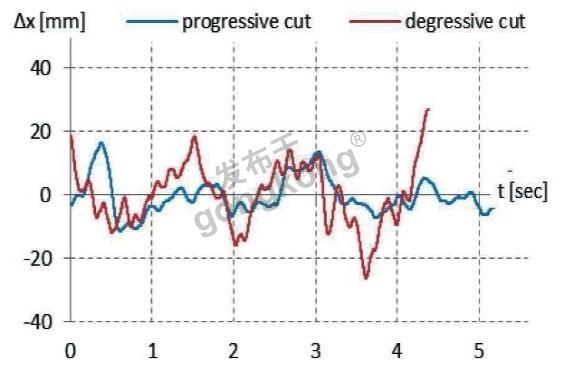
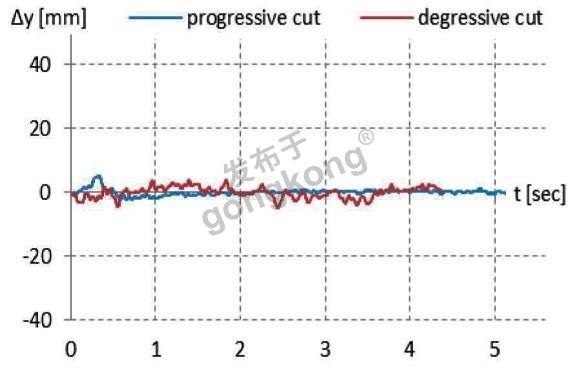
图13。刀盘位置沿平行于薄板并垂直于掘进 机轴线的“x”轴变化的过程至理论瞬时位置
图14。刀盘位置沿平行于铲和掘进机轴的“y”轴相对于理论瞬时位置的变化过程
在第一种情况下,刀盘位置与理论位置的最大偏差为27毫米,但平均不超过10毫米。在第二种情况下,对于递减切削,刀盘位置的最大偏差为45 mm,平均偏差保持在20 mm水平。
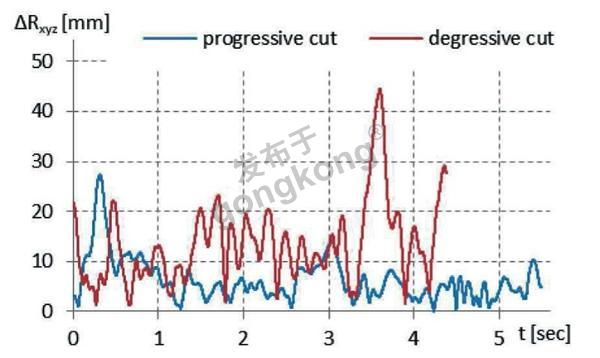
图15显示了递增和递减削减的比较。
5、 摘要
在研究过程中识别出的动臂和刀盘振动具有重要意义,在掘进机建模过程中或在采矿过程中自动控制掘进机挖掘系统参数时不能忽略。此外,刀盘位置与设定的理论位置的偏差往往大于刀盘上截齿的切削深度,导致截齿无法达到所挖掘的岩石或切削深度超过理论值。因此,刀盘的强烈振动使整个掘进机的工作动力显著增加。
使用高速摄像机进行振动测量或确定物体的运动轨迹在技术行业中相当普遍;但在采矿业,这是一种创新的解决方案。使用光学测量系统的主要问题是粉尘含量高,被测物体周围没有足够的空间,照明不足。然而,在实验室条件下(例如在西里西亚理工大学采矿机械化和机器人化系),这些障碍是可以克服的,高速摄像机光学测量系统在识别被测机器部件的运动和振动方面是一个有价值的工具。
来自 ResearchGate
作者:Rajmund Mann,Kamil Czerwiński,Kamil Matusik





楼主最近还看过
- 温控器什么牌子的好?
 [975]
[975] - 4-20mA的信号最远能传多少米[2011]
- 气相色谱仪原理[1556]
- (已结帖)工控仪表擂台第九十...[3580]
- 工控仪表擂台第八十期-测量汽...[4475]
- 多功能电表品牌[2164]
- 请教两种电流互感器连接电流...[1755]
- 致仪表板块所有坛友的一个建...[583]
- 火焰光度检测器(FPD)灵敏度下...[794]
- 热电偶补偿导线的作用 ?[618]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
