亚锐步进电机系统设计程序 点击:214 | 回复:0

发表于:2019-12-20 09:52:39
楼主
www.array,sh
步进电机的速度控制
APB有一个ACC功能块,该功能块配合其他输出功能可实现速度及位置控制。
例、如果步进电机的步距角是1.2°那么电机转一圈需要300个脉冲。如果驱动器的细分数设置为4,那么电机运转的分辨率为每个脉冲0.3°,电机转一圈需要1200个脉冲。
NPN型晶体管输出PLC与步进电机驱动器的接线图
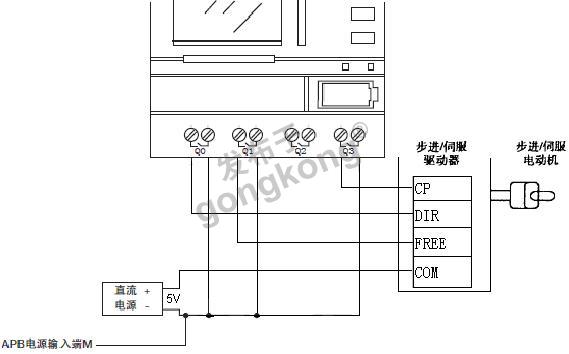
其中输出Q0控制脉冲方向,Q1控制电机电平,Q3(高速输出端)为驱动电机运转的脉冲信号。
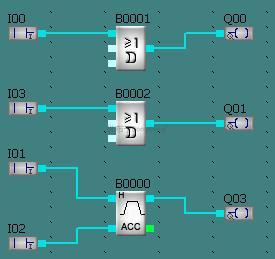
图2 速度控制程序
根据实际使用场合设定控制参数

图2 控制方式参数
参数设置
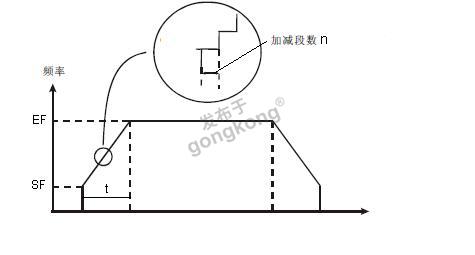
开始频率 (SF) 取值范围:1-100000
目标频率(EF) 取值范围:1-100000
加(减)速时长(t) 取值范围:10-5000
变化段数(n) 取值范围:1-100
输出脉冲个数 取值范围:1-99999999
每一段的变化时间Δt = t / 段数n
每一段的变化频率Δf = 目标频率 - 起始频率 / n-1
每一段的脉冲数 = Δt /( 1 / f),其中f为每一段的频率(f=每一段的频率的起始频率+每一段的变化频率Δf)
条件1:起始频率 ≤ 目标频率
条件2:Δt ≥ 1 / 起始频率
条件3: 起始频率 > 1





热门招聘
相关主题
- PLC控制变频器
 [8781]
[8781] - 请教STEP7 的仿真器PLCSIM如...[15762]
- PLC有输入,没有输出[23791]
- 自控系统设计中PLC的正确选择...[12825]
- 三菱PLC应用RS通讯指令如何正...[11872]
- 中文版的西门子S7-200仿真软...[8408]
- 三菱PLC中[mov h4 d100]是什...[9219]
- 西门子S7-1200与基恩士扫码器...[8999]
- PLC编程应该怎么收费呢[7909]
- 最全三菱plc高清视频教程fx-...[9688]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
