【ABB】ABB机器人加速度和最大速度设置 点击:5670 | 回复:8

发表于:2019-11-14 17:46:00
楼主
一、ABB机器人加速度的设置
ABB机器人RAPID中可以通过以下三种方式修改机器人加速度。
1. AccSet 50,50 表示机器人的加速度和加加速度(包括减速度和减减速度)均设置为50%
2. WorldAccLim On := 3.5;表示当前机器人的加速度和减速度最大值为3.5m/s2
WorldAccLim Off;表示当前机器人加速度恢复为默认
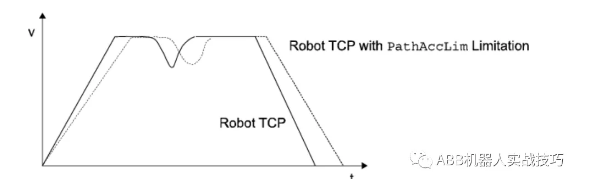
3. PathAccLim TRUE AccMax := 4, TRUE DecelMax := 3;表示当前机器人的加速度最大为4m/s2,减速度最大为3m/s2
PathAccLim TRUE AccMax := 4, FALSE;表示加速度最大为4m/s2,减速度默认
下图为使用加速度限制后,机器人加速时间变长,减速时间变长
二、ABB机器人理论最大速度
不同型号机器人理论最大直线速度不一。在使用运动语句时,可以直接使用vmax来使得机器人尽量达到该机器人能达到的最大速度。
MoveL p10,vmax,fine,tool0\WObj:=wobj1;
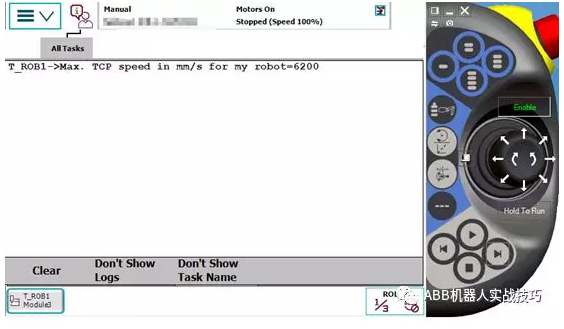
如何获取该机器人的理论最大直线速度?可以使用函数MaxRobSpeed()来获取。
在示教器插入如下代码,即可写屏显示机器人最大速度,如上图
TPWrite "Max. TCP speed in mm/s for myrobot="\Num:=MaxRobSpeed();





热门招聘
相关主题
- 丰田工机的PLC+测距仪通信,大...
 [1077]
[1077] - 机器人发展史[1627]
- 埃斯顿机器人[1028]
- 求ABB ROBOT IRC5与三菱q pl...[5276]
- 如何解决ABB机器人使用ATI换...[3822]
- 机械手的运动形式分为四类[932]
- YAMAHA YK400xg SCARA工业机...[3975]
- 机器人离线编程软件哪个好?[15036]
- 机器人[1252]
- KUKA机器人系统变量全集中文...[1785]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
