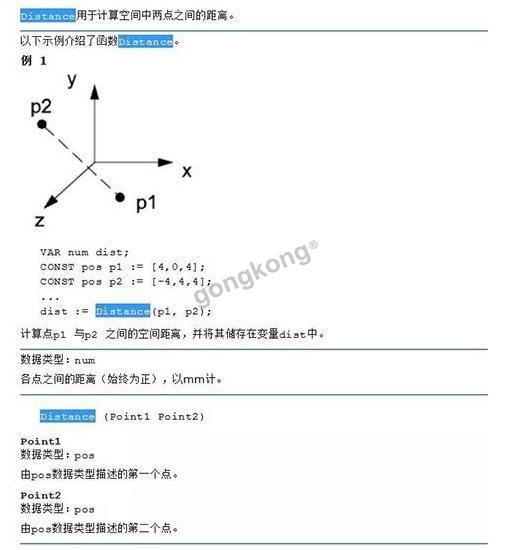
ABB机器人求两点间距离说明 点击:719 | 回复:1










楼主最近还看过

热门招聘
相关主题
- KUKA机器人焊接
 [1187]
[1187] - ABB机器人视频教学一[903]
- 这几天搞伺服,问题多多,解决...[1400]
- ABB机器人培训资料之四[800]
- ABB机器人弧焊工作站软件配置...[1354]
- ABB机器人备份错误问题[915]
- RobotStudio软件[3732]
- FANUC机器人简易零点标定和零...[4494]
- 松下VR-600G2机器人[1169]
- ABB资料文档视频教程大全[5273]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
