电子齿轮比(CMX/CDV)的计算及其意义 点击:10889 | 回复:214

电子齿轮比(CMX/CDV)的计算及其意义
刘志斌 2012.03.21
已知:
1)上位机发出脉冲能力为200Kp/S,200×1000/s,200×1000×60/min;
2)电机额定转速为3000R/ min,3000/60s;
3)伺服电机编码器分辨率是131072;
4)丝杆螺距是10mm;
求:
1、电机额定转速运行时的电子齿轮比?
2、如果电子齿轮比是1,伺服电机的转速?
3、生产时,设定指令脉冲当量,确定电子齿轮比?
解:
1、当上位机满额发出脉冲时,伺服恰好额定速度运行:
1)电机额定转速为3000r/ min,3000r/60s=50r/s;
2) 伺服电机编码器分辨率是131072;
3)电机额定转速时编码器输出检测反馈脉冲频率是131072×50r/s;;
4)上位机发出脉冲能力时发出的脉冲频率=200×1000/s;
5)当上位机满额发出脉冲时,伺服恰好额定速度运行,这时的电子齿轮比:
电子齿轮比=反馈脉冲频率/上位机满额发出脉冲频率
=(131072×50r/s)/ 200×1000/s
=6553600/200000
=32.768
2、如果电子齿轮比是1:
1)上位机发出的1个脉冲=编码器输出检测反馈的1个脉冲:
2)上位机发出脉冲能力时发出的脉冲频率=200×1000/s;
3)伺服电机的转速是=200×1000/s×60/131072= 91.55 r/min
3、如果丝杆螺距是10mm,
1)要求上位机每发一个指令脉冲,工件移动0.001mm,即指令脉冲当量为0.001mm,也可以说指令脉冲单位为0.001mm:
2)如果伺服转一周,丝杆转一周,减速比是1;
3)丝杆转一周,上位机应该发出的指令脉冲为10mm/0.001mm=10000(个);
4)伺服转一周,编码器检测反馈脉冲为131072(个);
5)电子齿轮比=编码器检测反馈脉冲/上位机发出的指令脉冲=131072/10000=13.7012;
反馈脉冲:伺服电机编码器的解析度,伺服本身的脉冲。
指令脉冲:上位机发出的脉冲;也可以说是外部给定脉冲。
脉冲当量:伺服接受上位机发出的每一个脉冲信号的位置移动量,又称作最小指令设定单位。
CMX :电子齿轮比的分子是电机编码器反馈脉冲。
CDV :电子齿轮比的分母是上位机的给定脉冲(指令脉冲)。
电子齿轮比:是用来把上位机的给定脉冲要换算成与电机编码器反馈脉冲同等意义,以便控制中心按给定指令要求控制伺服转动定位;





楼主最近还看过

择录于以下网页:
http://www.ddvip.com/mc/electron/component/8476.html
增量编码器的A/B输出的波形一般有两种,一种是有陡直上升沿和陡直下降沿的方波信号,一种是缓慢上升与下降,波形类似正弦曲线的Sin/Cos曲线波形信号输出,A与B相差1/4T周期90度相位,如果A是类正弦Sin曲线,那B就是类余弦Cos曲线。
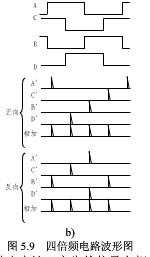
对于方波信号,A,B两相相差90度相(1/4T),这样,在0度相位角,90度,180 度,270度相位角,这四个位置有上升沿和下降沿,这样,实际上在1/4T方波周期就可以有角度变化的判断,这样1/4的T周期就是最小测量步距,通过电路对于这些上升沿与下降沿的判断,可以4倍于PPR读取角度的变化,这就是方波的四倍频。这种判断,也可以用逻辑来做,0代表低,1代表高,A/B两相在一个周期内变化是0 0,0 1,1 1,1 0 。这种判断不仅可以4倍频,还可以判断旋转方向。
严格地讲,方波最高只能做4倍频,虽然有人用时差法可以分的更细,但那基本不是增量编码器推荐的,更高的分频要用增量脉冲信号是SIN/COS类正余弦的信号来做,后续电路可通过读取波形相位的变化,用模数转换电路来细分,5倍、10倍、20倍,甚至100倍以上,分好后再以方波波形输出(PPR)。分频的倍数实际是有限制的,首先,模数转换有时间响应问题,模数转换的速度与分辨的精确度是一对矛盾,不可能无限细分,分的过细,响应与精准度就有问题;其次,原编码器的刻线精度,输出的类正余弦信号本身一致性、波形完美度是有限的,分的过细,只会把原来码盘的误差暴露得更明显,而带来误差。细分做起来容易,但要做好却很难,其一方面取决于原始码盘的刻线精度与输出波形完美度,另一方面取决于细分电路的响应速度与分辨精准度。例如,德国的工业编码器,推荐的最佳细分是20倍,更高的细分是其推荐的精度更高的角度编码器,但旋转的速度是很低的。

- 变频器在使用当中出现过电压...
 [428]
[428] - 三相异步电动机绝缘电阻偏低...[1459]
- 集中式与分布式过程安全控制...[2226]
- 电机绝缘电阻低的原因及处理...[1689]
- PID控制,里面有内部PID给定和...[3362]
- 数控等离子切割机切割断面倾...[497]
- 三菱FX2N与台达VFD-B变频器通...[686]
- 怎么用plc程序设置触摸屏的密...[5634]
- 全自动点胶机操作注意事项[412]
- 英语在自动化行业的重要性[746]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
