基于DSP的大功率高压变频器系统 点击:245 | 回复:0

1 引言
通用变频器调速装置的应用已经十分普及,作为大功率的高压变频调速技术也得到了广泛的应用。近年来各种类型的高压变频器不断涌现,其组成方案更是多种多样。到目前为止,虽然它还没有统一的拓扑结构,但正向着高可靠性、低成本、高输入功率因数、高效率、低输入输出谐波等方向发展。对于大功率的风机和泵类负载,一般不要求四象限运行,并且不进行快速和频繁的升速、降速,所以其控制要求也不高,无需考虑能量的回馈控制问题,因此可以采用二极管整流电路。另外,此类负载对调速精度的要求也不是很高,并且由于此类负载的负载转矩与转速的平方成正比,低速下负载转矩将会减小,因此十分适合通用的u/f等于定值的协调控制模式。本文主要针对文献【1】中的主电路结构,介绍单元串联多电平移相式pwm高压变频器的系统结构和实现。
2 单元串联多电平变频器原理
单元串联多电平变频器采用若干个低压功率单元串联来实现直接高压输出。本系统采用5单元串联结构。对于额定输出电压为6千伏的变频器,每相由五个额定电压为690伏的功率单元串联而成,输出相电压最高可达3450伏,线电压可达6千伏左右。每个功率单元承受全部的输出电流。但只提供1/5的相电压和1/15的输出功率。从结构上可以看出,单元的电压等级和串联数量决定了变频器输出电压,单元的电流额定决定变频器输出电流。由于这种方案并不采取传统的器件串联的方式来实现高压输出,而是采取整个功率单元的串联,所以不存在器件串联引起的均压问题。
本系统采用的是多电平移相式pwm技术,也就是说在进行pwm调制时,同一相的功率单元使用相同的调制正弦波,输出相同幅值基波电压,各串联单元载波信号之间互相错开一定的电角度。对于本系统的6kv变频器来说,由于每相采用5个单元进行串联,设载波周期为360度时,则载波依次移相72度(通过设定计时器初始计数值完成载波的移相)。经过载波的移相之后,就使得叠加后输出电压的等效开关频率大大的增加。举例来说,当每个单元的pwm载波频率为600hz时,输出相电压的等效开关频率为6khz。
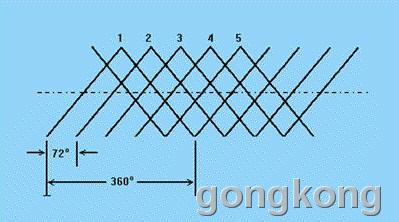
图1 载波三角波移位示意图
输出波形等效开关频率的提高,有助于改善输出电压波形,降低电流谐波。对于本系统的6kv变频器,其输出的相电压具有
共11种电平,对应的线电压则有21种电平,因此输出电压非常接近正弦波。
3 控制系统构成
dsp即数字信号处理器是一种具有特殊结构的微处理器,dsp芯片的内部采用程序区和数据区分开的哈佛结构,具有专门的硬件乘法器,广泛采用流水线操作,提供特殊的dsp指令,可以用来快速地实现各种数字信号处理算法。本系统中的控制电路中的主控部件采用美国德州仪器公司生产的tms320f24x系列dsp芯片,多片dsp协同作业,通过控制器局域网(can)进行相互间的通讯联系,完成控制参数的传递,从而实现移相式pwm脉冲的触发;并且能够对各种故障中断做出及时地处理。
3.1 控制电路
本系统采用的是主从多cpu控制系统。本系统的控制电路组成如图2所示。
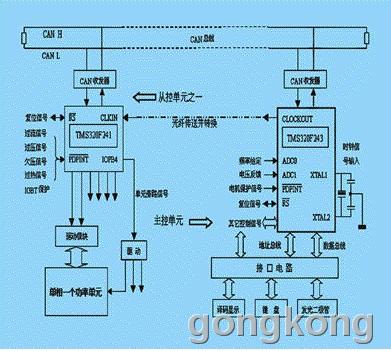
图2 系统控制电路原理图
由于主电路的每相为5单元串联结构,整个电路共有15个功率单元。对于各相中同一位置的三个功率单元,我们采用一片dsp进行控制,这样15个功率单元可以由5片dsp构成5个对称的子系统。再使用一片dsp作为主控芯片,对控制信号进行采样和运算以及必要的信息处理。对于每个子系统中的三个功率单元使用相同的载波信号,正弦调制波信号互差120度电角度;每相的5个功率单元共用一个正弦调制波信号,但三角载波错开72度电角度,从而实现移相控制。子系统时钟由主控单元给出,通过光纤传送,从而保证整个系统的时钟一致,不至于发生漂移。子控芯片根据给定的步长参数可以确定正弦调制波的频率,从而可以决定输出电压的频率;根据调制深度系数m(即pwm信号的占空比的变化百分数),通过运算可得到pwm信号的脉宽和间隔,产生触发信号,按一定规律控制功率器件的导通和关断,使输出获得一系列宽度不等的矩形脉冲电压波,从而控制逆变器输出交流基波电压的幅值。这样就实现了拟订的u/f控制方式。子控制系统同时还要对功率单元进行必要的保护。由于变频器系统的保护信号比较多,并且保护方式也不尽相同,在本设计中我们主要考虑的保护信号有:过流、过压、欠压和过热。在这四种典型故障情况下,子cpu将封锁其输出的全部pwm触发信号,同时向主cpu发出必要的信息,使其能够对发生的情况做出必要的响应和处理,并通过人机界面显示出故障情况。主控dsp主要负责对给定信号以及反馈信号的采样、实时计算、v/f查表求值、pi算法控制等等,并且通过数据和地址总线以及串行通讯接口与人机接口系统相连,从而完成信息的接收和显示。同时它还要对由子系统发送的信息进行分析和处理,监测系统的运行状况。同时,主控芯片将对电机回路进行必要的保护和处理。这样可以更加充分地发挥dsp处理器的强大的运算和实时处理能力。
主控芯片与从控芯片通过控制器局域网(can)相互连接。从而完成相互之间的一些必要的信息和数据的传送。在本系统中涉及到的需要传送的信息和数据主要有:调制频率信号、调制深度系数、比较输出控制字、保护中断信息以及初始化设定值信息等等。
采用这种控制电路,既保证了系统的功能实现和稳定运行,又有效地节约了设备成本,并且具有较强的功能扩展和升级能力,是一种切实可行的设计方案。
3.2 控制系统结构
根据所设计的硬件控制电路结构图,结合系统v/f控制原则和方式,可得到如下的控制系统结构图,如图3所示。整个控制系统的工作过程如下:
(1) 系统上电后,电机的运行频率及必要的控制参数由人为给定。
(2) 得到启动信号后,由主控dsp芯片对频率信号进行采样处理,将频率参数转换为步长参数,采样周期t=1/600
s,并且根据所得的频率参数进行查表运算,从而得出电压信号的给定值。
(3) 同时对电压反馈信号进行采样,与给定的电压信号进行实时的数字pi运算,求出电压的输出信号。
(4) 根据这个输出信号求出电压的调制深度系数m。
(5) 得到系统运行信号后,将步长参数、调制深度系数m和其它必要的控制参数通过控制器局域网发送给子dsp芯片处理系统。
(6) 子系统接收到必要的控制信号后,进行相应的处理,根据步长可以控制输出正弦波形的频率。
(7) 根据调制深度系数来控制输出电压的基波有效值,从而控制输出的电压幅值,完成u/f的协调控制。
(8) 由于各子系统初始化时,其计时器的初始值之间相差一定的数值,从而可以实现输出pwm波形的移位叠加。
(9)
各功率单元的保护由各子系统独立完成,并通过局域网向主控单元发送必要的信息。电机的保护可由主控单元完成,从而实现整个系统安全平稳运行。
3.3 控制程序流程图
(1) 主控dsp芯片主要对系统的控制信号进行采样和运算,及必要的信息处理。其程序流程图如图4所示:
(2)
从控dsp芯片主要负责pwm波形的产生,其主程序主要负责对相关的外围设备进行初始化,计时器周期中断子程序负责对三个比较寄存器的比较值的实时运算与更新,can中断子程序负责从主控dsp芯片中得到计算所需的相关参数。
从控dsp芯片主程序初始化流程图省略。
从控dsp芯片计时器周期中断子程序流程图如图5所示:
从控dsp芯片can中断子程序流程图如图6所示:
(3)
从控dsp芯片功率驱动保护程序主要是当功率驱动保护(pdpint)中断发生时,比较控制寄存器(comcon)中的第9位(fcompoe位)将被置0,这样就使得pwm输出管脚处于高阻态,输出触发脉冲。要再次输出pwm信号,这一位必须为1。如果用户将0写入fcompoe位,同样可以终止pwm信号的输出。





楼主最近还看过
- 关于国内外变频器的讨论
 [21199]
[21199] - 起重机大车\小车用变频器有无...[7907]
- 施耐德变频器常见问题及解答...[7521]
- 变频器带普通电机时,0-50HZ时...[5178]
- 电机转速与电机的什么参数有...[6295]
- 求助 变频器的输出功率怎么计...[12586]
- 变频器进线不能安装漏电保护...[5400]
- 安川G7变频器报SE2故障啥意思...[7444]
- 怎样根据电流值的大小判断离...[12366]
- 变频器可否长期低速运行??[6482]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
