请问一下下面这个问题怎么解决 点击:677 | 回复:4






楼主最近还看过


发表于:2025-08-30 21:22:50
3楼
可能的原因:
1、程序暂停/停止的指令冲突:
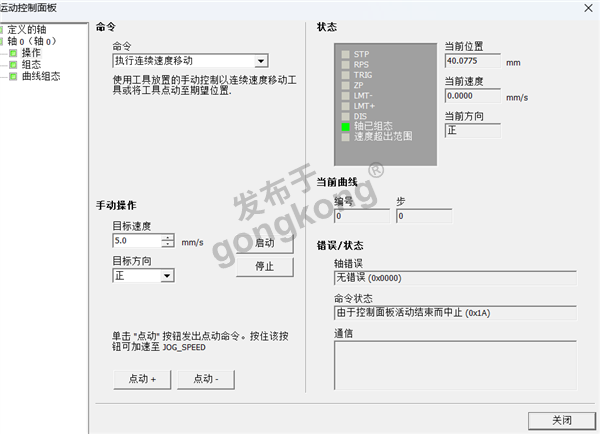
(1)运动控制面板可能触发了类似mc_stopprogram的指令,导致解释器程序完全终止而非暂停。
(2)若同时调用mc_groupinterrupt等指令,可能引发解释器报错并终止活动。
2、状态同步的问题:
运动解释器程序执行时,若未正确处理暂停/恢复状态变量(如未记录当前位置),可能导致控制面板活动异常终止。
3、还有可能是硬件或者信号的干扰导致:限位信号触发、脉冲输出异常或驱动器故障可能导致运动突然停止。
解决方案可以参考:
1、优化暂停/恢复逻辑
使用
mc_halt替代mc_stopprogram,实现减速暂停而非完全终止。定义状态变量(如
ispaused)监测暂停条件,并记录当前位置以便恢复。
2、避免指令冲突
在运动解释器程序执行期间,禁止调用
mc_groupinterrupt等冲突指令。
3、检查硬件与信号
验证限位开关接线及信号有效性(如I0.5/I0.3输入点)。
确保脉冲输出模式(单端/差分)与驱动器配置匹配。
当前可以先再次进行组态与调试:重新组态运动解释器工艺对象,确保参数(如测量系统、脉冲数)与硬件一致。
回复本条
-

热门招聘
相关主题

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
