有没有KUKA大神,指点一下CELL程序 点击:632 | 回复:10
之前没怎么用过KUKA,我想问一下KUKA的外部控制,启动的CELL程序,这个CELL可以修改嘛?
//********************************************************
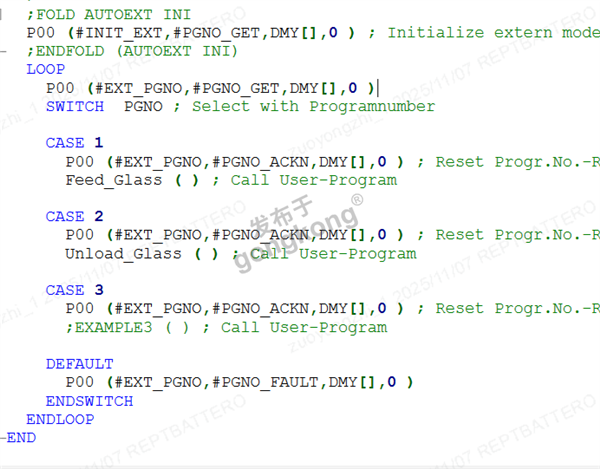
LOOP
P00 (#EXT_PGNO,#PGNO_GET,DMY[],0 )
SWITCH PGNO ; Select with Programnumber
CASE 1
P00 (#EXT_PGNO,#PGNO_ACKN,DMY[],0 ) ; Reset Progr.No.-Request
;EXAMPLE1 ( ) ; Call User-Program
CASE 2
P00 (#EXT_PGNO,#PGNO_ACKN,DMY[],0 ) ; Reset Progr.No.-Request
;EXAMPLE2 ( ) ; Call User-Program
CASE 3
P00 (#EXT_PGNO,#PGNO_ACKN,DMY[],0 ) ; Reset Progr.No.-Request
;EXAMPLE3 ( ) ; Call User-Program
DEFAULT
P00 (#EXT_PGNO,#PGNO_FAULT,DMY[],0 )
ENDSWITCH
ENDLOOP
//*****************************************************
这个,P00 (#EXT_PGNO,#PGNO_GET,DMY[],0 ) 我能换成自己的组信号不,然后SWITCH进入对应CASE,然后子程序执行完后,然后在用组信号反馈PLC完成信号啥的。(可以嘛?你们都是咋用的唉~)





楼主最近还看过



兄弟,这是库卡的外部启动,在cell里面,case1,case2..... 下面直接写上你的机器人的程序名字,或者你这台机器人只有一个程序,那就可以不用这几个case,注释掉,直接写上你的程序名字在这cell里;; 除此之外你要在示教器外部启动设置那把一些信号设置好;
常用的的是西门子1200或者1500与库卡机器人PROFINET通讯
1 你用workvisual把通讯配好(io)
2 在机器人示教器里有个选项外部启动配置,配好,比如那些:drive on, drive off ,enable..还有一些
这些你百度下库卡外部启动配置设备,就会告诉你怎么配下这些信号
3 还有问题,需要付费咨询,估计就算了,你是解决问题,百度足够以;
1----5----67536久七----六三-----------------
回复本条
-
 小趴菜123楼主
小趴菜123楼主明白,多谢!
2025-07-19 16:18:30回复



官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
