LabVIEW开发EtherCAT过程数据交互功能 点击:247 | 回复:0

系统依托EtherCAT 通信协议,实现单帧模式下过程数据的循环交互,支持从站设备状态管理、数据读写及系统初始化与终止等操作,为工业自动化控制场景中设备间实时数据交互提供解决方案。
功能详细说明
1. 系统初始化与拓扑查询
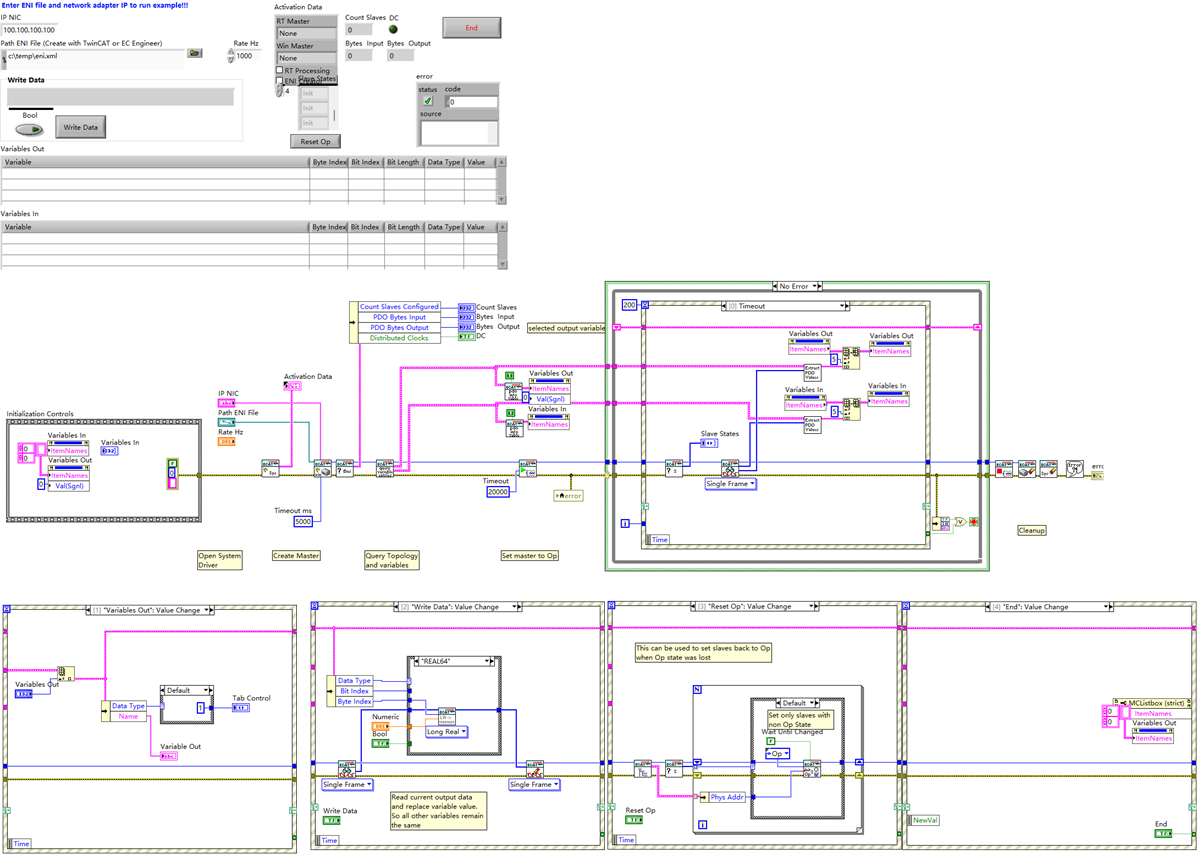
功能流程:通过 “Open System Driver” 打开系统驱动,“Create Master” 创建主站,“Query Topology and variables” 查询从站拓扑与变量信息,“Set master to Op” 将主站设为操作状态,完成系统初始化与通信准备。
作用:建立 EtherCAT 通信基础环境,识别网络中的从站设备及可交互变量,为后续数据交互做准备,确保主从站通信链路正常建立。
2. 变量数据交互(输入输出)
输入数据读取:从 “Variables In” 获取输入变量,经 “Extract Values” 等节点解析,可获取从站设备反馈的状态、传感器数据等信息,如读取电机转速、温度传感器数值等。
输出数据写入:在 “Write Data” 模块,可选择数据类型(如 “REAL64” ),设置位索引、字节索引等参数,将模拟量(如控制电压值)或数字量(如开关信号)写入 “Variables Out”,实现对从站设备(如驱动器、执行器)的控制。
3. 从站状态管理
状态监测:“Slave States” 节点可实时监测从站运行状态,反馈从站是否处于正常操作(Op)状态等信息。
状态重置:当从站操作状态丢失时,“Reset Op” 功能可筛选非 Op 状态的从站,通过设置 “PhysAddr”(物理地址),将其恢复为 Op 状态,保障从站持续稳定参与数据交互。
4. 系统终止
功能实现:“End” 操作触发时,清空 “MCL istbox” 中的 “ItemNames” 等变量,关闭系统相关资源,有序终止数据交互过程,避免异常关闭导致的通信残留问题。
应用范围
工业自动化产线:用于自动化生产线上的设备协同控制,如机器人、传送带、加工机床等设备间的实时数据交互,实现精准同步运行。
智能仓储系统:在堆垛机、AGV(自动导引车)等设备的通信控制中,传递位置、速度、任务指令等数据,保障仓储作业高效执行。
新能源设备:像光伏逆变器、风电变流器等设备的集群控制,交互运行参数、状态监测数据,辅助能源高效转换与调配。
适用场合
对实时性要求高:需毫秒级甚至更短周期数据交互的场景,如高速自动化加工、运动控制,保障设备动作精准同步。
多设备协同作业:存在多个从站设备(如多个传感器、执行器),需主站集中管控、统一调度数据的场合,便于构建集中式控制系统。
设备状态需动态调整:从站设备可能因故障、外部干扰等丢失操作状态,需快速恢复并持续通信的环境,保障系统稳定性。
注意事项
配置准确性:IP NIC(网络适配器 IP )、ENI 文件路径需准确配置,否则无法建立通信,需提前通过 TwinCAT 或 EC Engineer 正确生成并校验 ENI 文件。
数据类型匹配:写入 “Variables Out” 的数据类型需与从站设备预期一致,若类型不匹配(如应写布尔量却写入实数),会导致控制指令失效或设备异常。
超时设置:“Timeout” 参数需合理设置,过短可能因网络延迟、设备响应慢导致通信中断,过长则会降低系统故障响应速度,需根据实际网络与设备性能调试。
状态监测与维护:需定期通过 “Slave States” 监测从站状态,及时处理非 Op 状态从站,避免单个从站异常影响整个系统数据交互流程。





楼主最近还看过

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
