LabVIEW Modbus 主站冗余控制 点击:193 | 回复:0

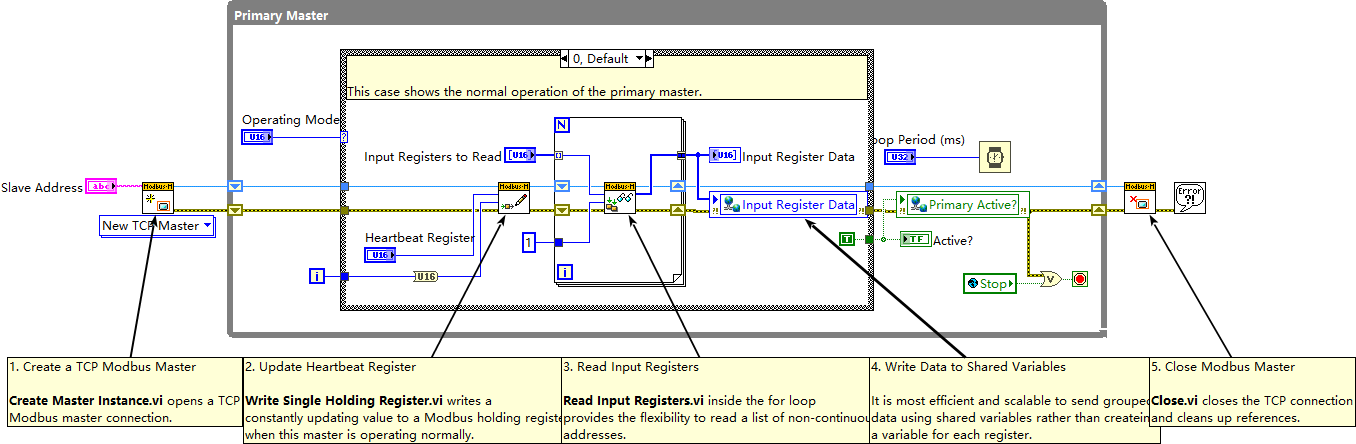
LabVIEW 实现Modbus TCP 主站程序,借助定时更新从站保持寄存器构建主站冗余机制。主站周期性写入 "心跳" 值,副站通过监测该寄存器判断主站状态,实现故障时无缝接管控制,保障系统持续运行。
核心功能解析
主站心跳机制
功能:周期性向从站保持寄存器写入递增计数器或时间戳
使用场合:工业自动化系统主备控制切换、SCADA 系统冗余通信
特点:
图形化配置通信参数(IP / 端口 / 寄存器地址)
支持毫秒级定时精度(最小周期 10ms)
内置 CRC 校验自动生成与验证
注意事项:
需与从站约定专用心跳寄存器地址(避免与控制参数冲突)
建议配置双寄存器存储时间戳(覆盖 24 小时范围)
对比同类:
较传统 PLC 梯形图编程:开发效率提升 50%
较 Python pymodbus 库:无需编写底层通信代码,调试更直观
从站状态监测
功能:实时读取心跳寄存器值,计算超时时间判断主站状态
使用场合:双主热备系统中副站监控主站活性
特点:
支持自定义超时阈值(建议设为心跳周期的 3-5 倍)
异常状态自动触发报警事件(如写入特定寄存器通知从站)
注意事项:
需考虑网络波动导致的短暂通信中断(增加滤波算法)
首次启动时需同步主备站初始状态
冗余切换控制
功能:主站故障时自动切换副站接管控制权
使用场合:电力系统、轨道交通等不能中断的控制场景
特点:
毫秒级切换响应时间(典型值 < 200ms)
支持手动 / 自动两种切换模式
状态切换过程可记录完整日志
注意事项:
需确保主备站控制逻辑完全一致
切换时需处理数据同步(如当前控制参数快照)
技术参数对比
指标 | LabVIEW Modbus 冗余方案 | 传统 PLC 冗余方案 | Python + Modbus 库方案 |
开发周期 | 1-2 周(图形化配置) | 3-4 周(梯形图) | 2-3 周(代码编写) |
定时精度 | ±1ms(基于 RT 系统) | ±10ms | ±50ms(依赖 OS 调度) |
故障切换时间 | <200ms | <500ms | >500ms |
调试难度 | 低(可视化数据流) | 中 | 高(代码断点调试) |
跨平台兼容性 | Windows/Linux/macOS | 特定 PLC 硬件 | 依赖库支持 |
典型应用场景
电力监控系统
主站监控变电站设备状态,副站实时监测主站心跳
主站故障时副站自动接管,保障电网数据采集连续性
化工反应釜控制
双主站控制温度 / 压力等关键参数
心跳机制确保任何一台控制器故障时不影响生产安全
智能交通信号控制
路口信号机主备控制切换
确保交通高峰期系统稳定运行
扩展建议
增强故障诊断
添加 Modbus 异常码解析(如 03 号异常表示寄存器地址非法)
记录每次通信的响应时间,分析通信质量趋势
优化数据同步
实现关键控制参数的实时镜像(如 PID 设定值)
采用 NI 共享变量机制替代寄存器读写,提升同步效率
远程监控扩展
集成 Web Server 模块,通过浏览器查看主备站状态
配置短信 / 邮件报警功能,及时通知运维人员
通过 LabVIEW 图形化编程优势,显著降低了Modbus 冗余控制系统的开发难度,同时保持了工业级的可靠性与实时性,尤其适合中大型自动化系统的主备控制需求。





楼主最近还看过

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
