该程序是基于 NI LabVIEW 平台开发的 CAN(Controller Area Network,控制器局域网)通讯测试程序。主要功能是对 CAN 通讯过程进行模拟、数据传输与验证,确保 CAN 通讯的正常运行和数据的准确传输。
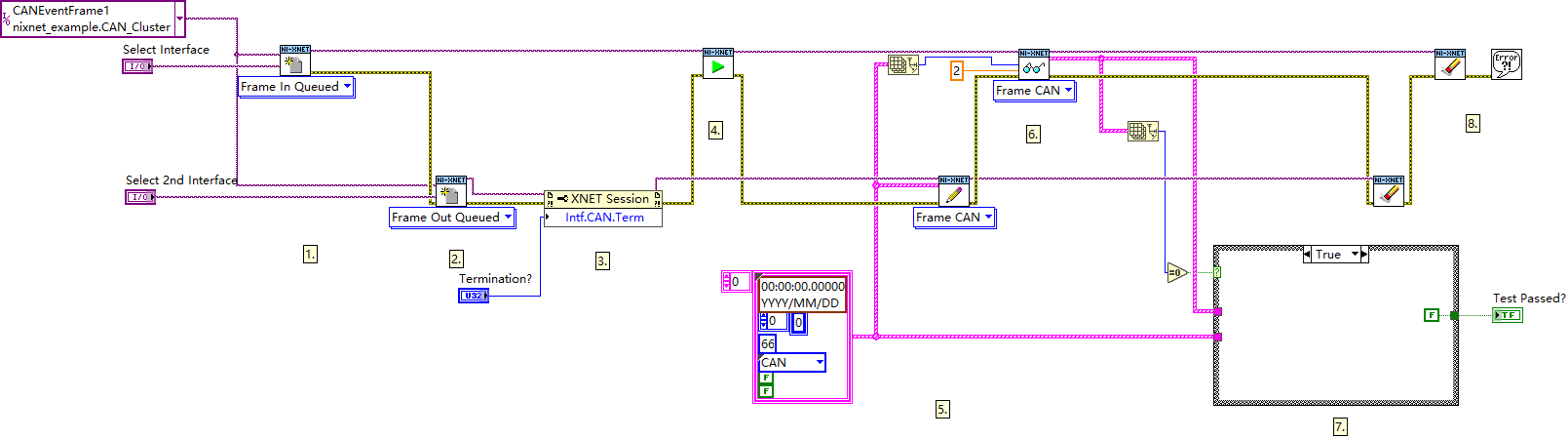
接口选择(步骤 1)
创建队列帧会话(步骤 2)
功能:分别创建 “Frame In Queued” 和 “Frame Out Queued” 的 XNET 会话。这两个会话分别用于输入队列帧和输出队列帧,相当于在 CAN 通讯的发送端和接收端建立数据缓冲机制。
原理:基于 NI 的 XNET(NI-XNET 是 NI 公司用于汽车网络通讯测试的软件工具包)技术,在 LabVIEW 环境中构建虚拟的帧队列,按照一定的规则管理和调度要发送和接收的 CAN 帧数据。
终端配置(步骤 3)
启动输入会话监听(步骤 4)
数据发送(步骤 5)
数据读取(步骤 6)
数据比较与测试验证(步骤 7)
用途
汽车电子领域:CAN 通讯广泛应用于汽车内部的电子控制系统,如发动机控制单元(ECU)、车身控制模块(BCM)、防抱死制动系统(ABS)等之间的数据交换,实现车辆各部件之间的信息共享和协同工作。
工业自动化:在工业生产线上,用于连接传感器、执行器、控制器等设备,实现设备之间的实时数据传输和控制指令传递,提高生产过程的自动化程度和效率。
智能交通系统:用于车辆与车辆(V2V)、车辆与基础设施(V2I)之间的通讯,为自动驾驶、智能交通管理等提供数据交互基础。
特点和特征
多主架构:CAN 总线允许多个节点同时作为主节点发送数据,不存在传统总线结构中的主从之分,每个节点都有权在总线空闲时发送数据,提高了通讯的灵活性和可靠性。
非破坏性仲裁:当多个节点同时竞争总线发送数据时,采用非破坏性仲裁机制。优先级高的消息会优先发送,而优先级低的消息在仲裁失败后会自动停止发送,并等待总线空闲后重新发送,避免了总线冲突,保证了通讯的高效性。
错误检测与处理:CAN 协议具备强大的错误检测功能,包括位错误、填充错误、CRC 错误等。一旦检测到错误,节点会自动发送错误帧通知其他节点,并进行错误处理,如重发数据等,提高了数据传输的准确性和可靠性。
高实时性:CAN 通讯的数据传输速率较高,在不同的应用场景下可配置不同的波特率(如 125Kbps、250Kbps、500Kbps 等),能够满足实时性要求较高的应用场景,确保数据及时传输和处理。
NI CAN 接口卡:如 NI PCIe - 8512/8514 等,这些接口卡可以直接插入计算机的 PCIe 插槽,提供高速稳定的 CAN 通讯接口,支持多种 CAN 协议标准(如 CAN 2.0A、CAN 2.0B 等),并且与 LabVIEW 等 NI 开发工具高度集成,方便用户进行二次开发和应用。
NI CompactDAQ 机箱搭配 CAN 模块:NI CompactDAQ 是一种便携式、可重新配置的数据采集系统。搭配 CAN 模块(如 NI 9845 等),可以在工业现场、实验室等环境中灵活搭建 CAN 通讯测试和数据采集系统,实现对 CAN 总线上数据的采集、分析和控制。











 客服
客服


 小程序
小程序


 公众号
公众号



 客服
客服


 小程序
小程序


 公众号
公众号

 工控网智造工程师好文精选
工控网智造工程师好文精选
