
EtherCAT - 現場乙太網路總線
本節對EtherCAT(控制自動化技術的以太網)進行了深入介紹。以下信息也可以在EtherCAT手册中找到,該手冊有多種語言版本。
隨著通信技術的進步,工業通訊現場總線技術在工業控制系統中得到了廣泛的應用。然而,乙太網路的技術已經成為最先進、最經濟的通訊技術之一,在各個領域應用最為廣泛,其相關的硬體和軟件也隨著技術普及而處於快速發展之中。
EtherCAT (Ethernet Control Automation Technology) 是一種基於以太網的工業通信技術,旨在用於自動化(尤其是機器自動化)。憑藉以太網的優勢(通用性、高速、低成本),它以驚人的速度增長。 EtherCAT 主要用於連接高速實時 I/O 設備。
通訊水平比較:
工廠級:< 1000ms(乙太網路 – TCP/IP 等) IPC / 服務器 PC / 無線
機器級:< 100ms (Modbus / CC-Link 等) HMI / Panel PC
單機型:< 5ms (EtherCAT等)數字IO/模擬IO/CANOpen接口
EtherCAT 協議概述
EtherCAT 是一種實時工業以太網技術,最初由 Beckhoff Automation 開發並由 ETG(EtherCAT 技術集團)維護。 IEC 標準 IEC61158 中公開的 EtherCAT 協議適用於自動化技術、測試和測量以及許多其他應用中的硬、軟實時要求。
EtherCAT 開發期間的主要重點是短週期時間 (≤ 100 µs)、精確同步的低抖動 (≤ 1 µs) 和低硬件成本。
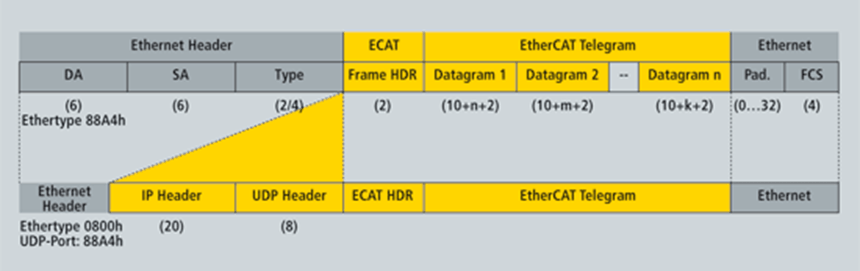
關於OSI網絡模型,EtherCAT協議主要定義在數據鏈路層和應用層。除了標準的 EtherCAT 數據包 (EtherType = 0x88A4) 或 UDP 格式 (EtherType = 0x0800) 之外,還可以使用 EtherType,如下圖所示。
EtherCAT 文本主要包含 ECAT 標頭(幀標頭)和 EtherCAT 電報。
靈活的拓撲結構
線形、樹形、星形或菊花鏈:EtherCAT 支持幾乎所有拓撲結構,並在電纜類型方面提供很大的靈活性。工業以太網電纜可在 100BASE-TX 模式下相距 100m 的兩個節點之間使用;此選項支持使用單線連接傳感器等設備。光纖(例如 100BASE-FX)也可以用於例如大於 100m 的節點距離。 EtherCAT 還提供完整的以太網接線範圍。

高速性能
通過 EtherCAT 的尋址方式和 EC-Slaves 硬件執行的內存控制技術“現場總線內存管理單元 (FMMU)”,我們可以通過一個互聯網數據包同步交換總線上所有 ECAT-Slaves 的所有數據。數據類型包括DIO、AIO、伺服電機位置等。請參考下圖。

EtherCAT 從站通常配備有 EtherCAT 從站 IC(所謂的 ESC)。採用FMMU技術,1000個單元I/O數據的交換僅需30us即可完成。 100軸伺服電機的數據只能在100us內交換。請參考下表。 (根據ETG數據)
| 數據處理 | 更新時間 |
|---|---|
| 256個分佈式數字I/O | 11μs |
| 1000個分佈式數字I/O | 30μs |
| 200 通道模擬 I/O(16 位) | 50μs ( =20kHz ) |
| 100 個伺服軸(每軸 8 字節輸入和輸出) | 100μs |
| 1 個現場總線主網關(1486 字節輸入和 1486 字節輸出數據) | 150μs |
軸控制迴路的 100us 數據交換速度等於 10 kHz 的控制帶寬。它足以進行速度閉環控制,甚至轉矩控制。
用於高精度同步的分佈式時鐘
在需要同時動作的空間分佈過程的應用中,精確同步尤為重要。例如,多伺服軸執行協調運動的應用就是這種情況。
與完全同步通信的質量直接受到通信錯誤的影響相比,分佈式同步時鐘對通信系統中的抖動具有高度的容忍度。因此,用於同步節點的 EtherCAT 解決方案就是基於這種分佈式時鐘(DC)。

EtherCAT 的同步機制基於 IEEE-1588 精密時鐘同步協議,並將定義擴展到所謂的分佈式時鐘 (DC)。簡單來說,每個 EtherCAT ESC 都維護一個基於硬件的時鐘,最小時間間隔為 1 納秒(總共 64 位)。 EC-Slave 維護的時間稱為本地系統時間。
通過精確的互聯網時間同步機制和動態時間補償機制(*1),EtherCAT DC 技術可以保證每個 EC-Slave 本地系統時間之間的時間差在 +/- 20 納秒以內。下圖是兩個從設備輸出數字信號的範圍視圖。我們可以看到,來自兩個 EC-Slaves 的 I/O 信號之間的時間差約為 20 納秒。
(*1) 請參考 EtherCAT 標准文檔 ETG1000.4

傳統解決方案和 EtherCAT 方案的比較
在自動化領域中,隨著現場總線技術在自動化技術中普及,使得基於 PC 控制系統得以廣泛使用。現今的主流架構,可簡單區分為傳統與 EtherCAT:

傳統的解決方案:
主要是按層級所劃分的控制體系,通常由幾個輔助系統組成 (週期系統):如實際控制任務、現場總線系統、 I/O 系統中的本地擴充總線或外圍設備的簡單本地裝置。
以 ISA Bus 為例, ISA 總線在自動化的領域中已有超過40年的歷史,其最大傳輸速度可達8MHz,包羅萬象的軟體源代碼及成功的使用案例,使其成為自動化領域中廣為使用的架構。
EtherCAT
EtherCAT是近年在自動化相關應用中逐漸受青睞的架構,其主站與從站設備的連結只需透過網路線即可,使得 EtherCAT 裝置有著快速安裝、配線簡單、與節省安裝人力等優勢並從眾多工業通訊標準中脫穎而出。
以太網往往在某種程度上代表著技術發展的水平。過去普遍採用現場總線系統的應用類型要求系統具備良好的實時能力、適應小數據量通訊,並且價格經濟實惠,而 EtherCAT 可以滿足這些需求。 EtherCAT 適用於自動化技術、測試和測量以及許多其他應用中的實時要求。

















 工控网智造工程师好文精选
工控网智造工程师好文精选
