LabVIEW开发基于脑机接口的航空航天相机载体 点击:240 | 回复:0

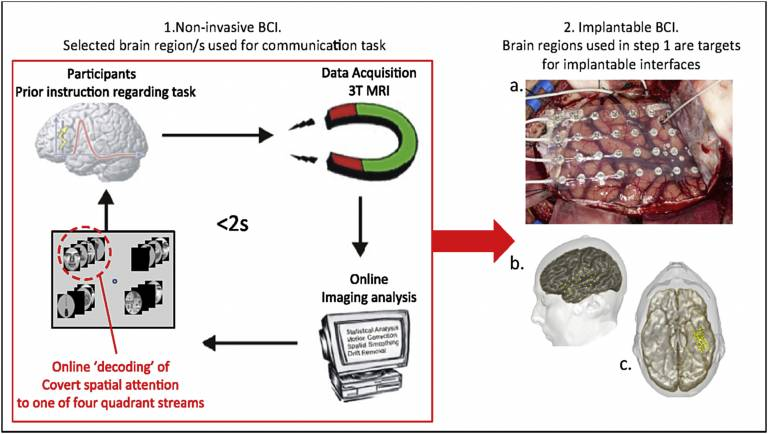
脑机接口是人脑与外部世界之间的直接通信渠道。脑机接口是一个全新的人机界面系统。该系统获取和分析生物电信号,目标是直接在大脑和外部设备之间创建一个通信通道。计算机或微处理器的发展提高了复杂的数据处理能力。生物电信号处理技术,特别是脑电特征提取算法,使实时脑机接口系统成真。
系统设计的基于P300的在线脑机接口系统,用于在航空航天的太空飞船外拍照。包括三个设备:视觉刺激显示器,脑电采样处理设备和自行设计的机器人。在LabVIEW平台上设计的视觉刺激有八种选择的范式。选择DSP作为微处理器,对视觉诱发电位进行采样,并提取P300特性进行机器人控制。该机器人被设计为一个六向自由操纵器来携带相机,并具有两个拍照操作。
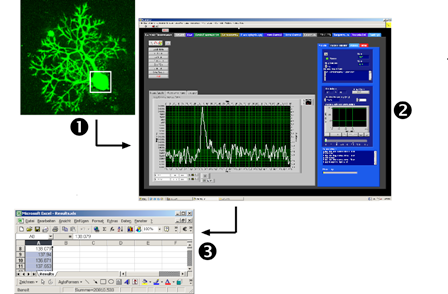
脑电图采样和处理设备在人与机器人之间形成桥梁非常重要。设备中包括两个模块,一个是前言脑电预处理,另一个是P300提取。
信号预处理是该系统的关键部分。根据信号流,有电极、屏蔽线、放大器、AD转换前的DSP。脑电信号的电压介于5μV和1000μV。它太小,无法采样和检测。脑电放大器旨在放大微小信号。放大器包括三个部分:电力隔离器、50Hz波形捕获电路和模拟放大器。频率带宽设置在0.25到100Hz之间。电隔离器用于分离公共GND连接,以减小纹波干扰。50Hz波形捕获电路用于消除电源和电磁铁干扰。模拟放大器设计用于放大EEG信号。放大倍数为20000。
基于VEP脑机接口系统,采用小波分析提取P300。脑电图处理包括两个步骤:一个是信号去噪,另一个是P300提取。前一步旨在提高信号噪声比,后一步是从EEG中提取有用的特征。脑电图处理有四个步骤:低通滤波、小波到趋势基线漂移消除、单除法块平均值和小波去噪。
由于机器人被应用为相机的载体,因此机器人必须适合相机在航空航天中的移动和操作。机器人被设计为携带相机的操纵器。
机器人包含1个旋转模块和2个移动模块,对于旋转模块,采用直流电机作为驱动装置,而步进电机用于移动模块。此外,旋转模块还配备了分辨率为500p/n的增量式旋转编码器,以提供半闭环控制所需的反馈信号。在2个移动模块的末端,安装了跳闸开关,以将范围限制在0∼256米.对于旋转模块,有2个电磁接近开关,使整个支柱在±180度范围内移动。机器人实现终端是由方向舵控制的夹具。
脑机接口和机器人之间应用两种类型的通信,一种是RS-485,另一种是无线局域网。D-link无线网络产品用于无线连接设备。为了表达机器人的移动和操作顺序,通信协议中需要简单的编码/解码。
基于P300的视觉刺激界面由三部分组成:对话框左半部分的闪烁块,上面的方法选择和反馈结果以及对话框右半部分底部的采样数据设置。
在航空航天中没有测试的条件,因此测试是在实验室进行的。为了测试系统的稳定性,命令是随机的。在实验中,引导者下达命令并打开系统。进行正常测试和模拟测试以分析更多数据。
受试者以50厘米的距离坐在LCD显示器前,凝视着正常测试对话框中记录的选定块。在每个命令开始之前,每个主题有10秒的准备时间。在实验过程中,受试者应高度集中注意力,不要眨眼,受试者必须保持闪烁块停止后2秒的状态。大约3秒后,模式识别的结果通过DSP和PC的通信出现在显示器中。同时,将订单发送到机器人微控制器以移动或操作相机载体。每个受试者重做实验3-4次。此外,连续的订单可以在LabVIEW平台中作为一行输入。疲劳下的受试者导致测试结果不佳,因此命令数量不超过4个。
基于事件相关电位P300脑机接口的相机载体专为航空航天应用而设计。两个因素用于评估脑机接口,一个是准确率,另一个是速度。脑机接口研究的关键问题仍然是如何提高脑电图模式识别的准确性。
这是LabVIEW的一个应用,更多的开发案例,欢迎登录北京瀚文网星官网,了解更多信息。有需要LabVIEW项目合作开发,请与我们联系。





楼主最近还看过
- WINCC假死后复位小窍门
 [3516]
[3516] - 急,请教exb文件用什么打开[2983]
- 中科新控监控组态软件SIAVIE...[2177]
- 几种组态软件的比较,各位也可...[15014]
- 每天电脑重启后打开SIMATIC ...[2102]
- MicroLogix 1400 PLC故障诊断...[3848]
- 七天实战速成培训教程(PLC篇...[3294]
- SolidWorks 2015 MBD—利用三...[2419]
- 有需要电力组态软件的请进[5993]
- 232串口与485串口通信程序有...[2101]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选

{kind=link}