捷米特EtherCAT远程分布式IO连接TwinCAT软件快速配置方法 点击:503 | 回复:0

发表于:2023-03-05 15:24:56
楼主
TwinCAT软件连接捷米特EtherCAT远程分布式IO快速配置方法
EtherCAT(以太网控制自动化技术)是一个开放架构,以太网为基础的现场总线系统,其名称的CAT为控制自动化技术(Control Automation Technology)字首的缩写。

捷米特Ethercat远程IO(JM7000):EtherCAT(以太网控制自动化技术)是一个开放架构,以工业以太网为基础的现场总线系统,其名称的CAT 为控制自动化技术(Control Automation Technology)字首的缩写;内置2000mA电源,自用并给后续模块供电;组态简单,适配TwinCAT、Codesys、欧姆龙、Ethercat板卡等绝大部分EtherCAT主站;IN/OUT两路以太网总线接口,体积小巧

JM7000 接不同的EtherCAT 主站,其组态方法和使用的软件是不一样的。下面以JM7000 接主站TwinCAT时,使用 TwinCAT 软件进行组态操作说明。

打开TwinCAT软件,安装XML文件
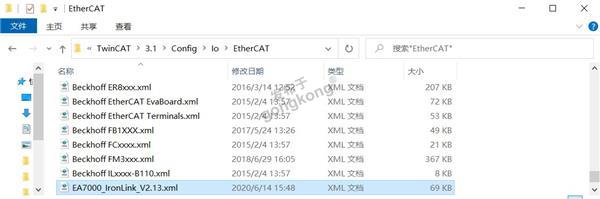
运行TwinCAT之前,先将JM7000最新版本的 ESI 配置文件放入 TwinCAT 对应的安装目录中,如下图所示(具体需要根据对应的安装目录):
打开 TwinCAT 的相关位置,右击选择 TwinCAT XAE 扫描设备信息,运行TwinCAT如下图所示:

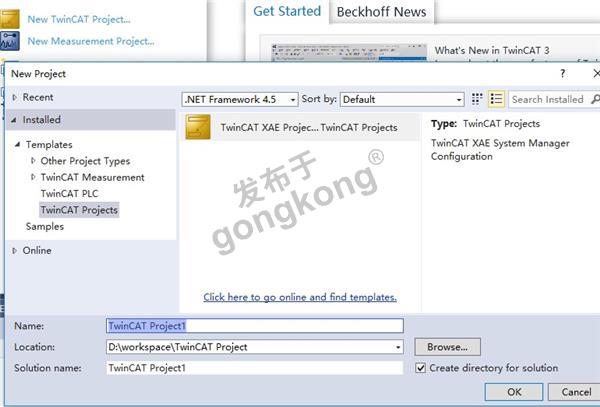
选择“New TwinCAT Project”创建工程:
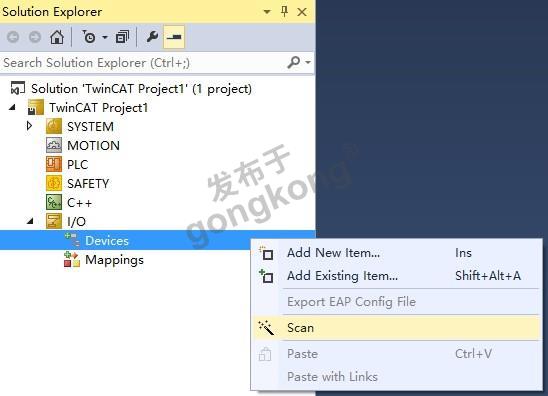
在Devices中,扫描设备选择“Scan”
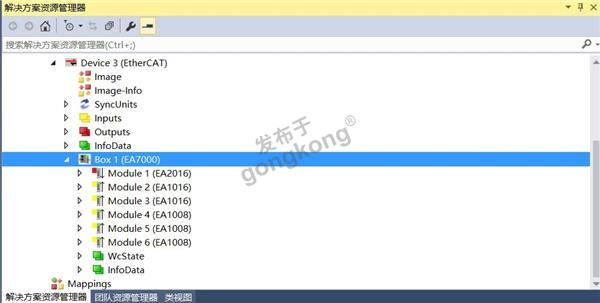
扫描结果,扫描到 Box 1(JM7000)既是我们的 coupler,还下挂了几个 IO 设备,所以都可以看的到。
数据交互界面,如下图所示,JM2016 的 16 通道显示结果,可以在此界面进行配置。







楼主最近还看过
热门招聘
相关主题
- 现场总线通讯接地探讨
 [5694]
[5694] - AB指令集[2339]
- 智能型开放控制器IIOC的简介...[1537]
- 请教“本征安全”[3363]
- 485通信光通信解决方案[2957]
- 求助:有关RS485的通讯协议[9327]
- 现场总线P-NET[2049]
- P-NET系列讲座(五):多网结构...[1866]
- RS485最远的传输距离是多少?...[3058]
- 请回答刚入行人的简单一问,感...[4080]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
