米尔基于Zynq 7000系列单板的FPGA农业生产识别系统解决方案 点击:1418 | 回复:2

随着农业生产模式和视觉技术的发展,农业采摘机器人的应用已逐渐成为了智慧农业的新趋势,通过机器视觉技术对农作物进行自动检测和识别已成为采摘机器人设计的关键技术之一,这决定了机器人的采摘效果和农场的经济效率。目前市面上最常见的是基于单片机开发的自动采摘机器人,但是随着人工智能的快速发展,通过建立神经网络基于大量图像数据训练的识别方法成为新一代智慧农业发展必不可缺的硬性条件。

智慧农业-图片来源于网络
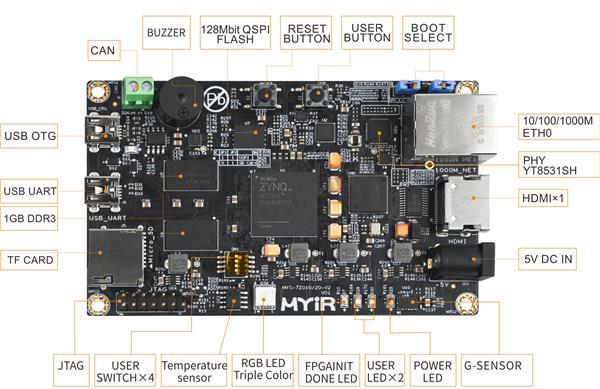
附基于Xilinx -7Z010/20处理的MYS-7Z010/20-V2单板资料: SOC:Xilinx Zynq-7010/20 高性能双核ARM Cortex-A9处理系统(PS),FPGA架构:可编程逻辑单元 XC7Z010(28K,约43万逻辑门 )XC7Z020(85K,约1.3M逻辑门)。 系统内存:1GB DDR3 SDRAM(512MB*2) 存储:QSPI 默认16MB,TF CARD槽(支持外部启动) 网络:一路千兆网口 视频:HDMI接口 USB:USB HOST*2 JTAG:1路PS/PL复用 JTAG接口(进行编程调试下载) 供电:5V/0.5A 为了开发的多样性,米尔还为Z-turn Board设计出专属Z-turn IO Cape,扩展了Z-turn 的普通IO,ADC,LCD,摄像头接口等,能搭配更多的外设模组共同使用。大大扩展了开发场景。 







楼主最近还看过
- 步进驱动器
 [1128]
[1128] - 求教:有少数元器件组成的低成...[2586]
- MCGS网络版电话远程浏览(一)...[1227]
- DOC盘的问题!!![2321]
- QXD-DM8168HDMI开发板带HDMI...[1308]
- 谁知道Keil C51的使用方法[1033]
- 8254计数值的读取,,急!!!...[1462]
- 初学者的问题。[1196]
- 高效、低成本的32位嵌入式网络...[1642]
- 传感器信号单片机如何处理[992]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
