Ethercat步进控制搭配欧姆龙上位机案例 点击:1105 | 回复:8

产品:Ever步进Ethercat总线驱动器EEDO-06-80、上位机欧姆龙NX1P2
1.导入ESI(.xml)文档.
将EEDO-06-80的描述文件SW3-C680_V2.6_Ful.xml复制到
Sysmac Studio安装路径下的 UserEsiFiles 文件夹中
如:C:\Program Files (x86)\OMRON\Sysmac Studio\IODeviceProfiles\EsiFiles\UserEsiFiles
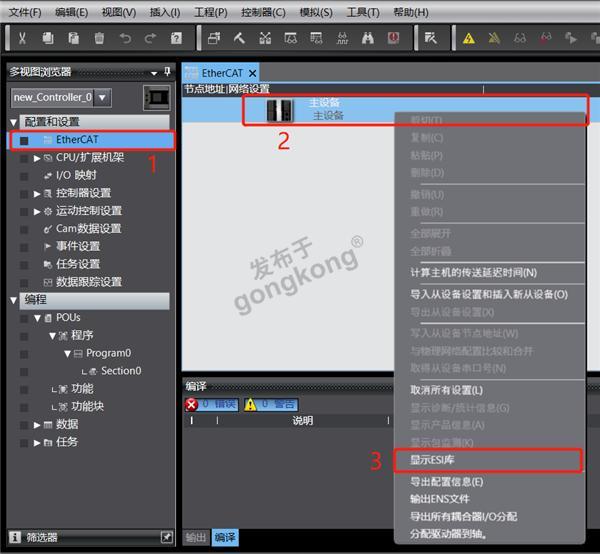
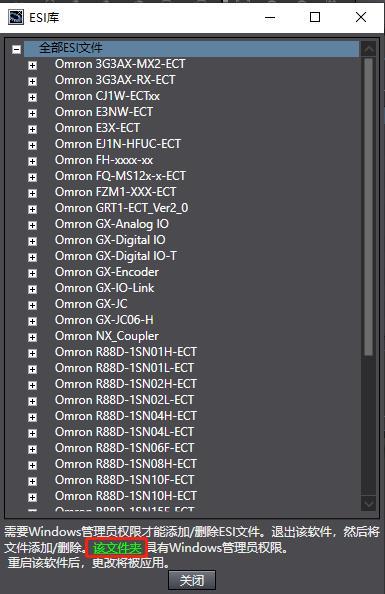
如果不确定安装路径,可以在Sysmac Studio软件中的EtherCAT界面中单击鼠标右键,显示ESI库
找到.(导入成功后需重启Sysmac Studio).
2.建立EEDO-06-80轴并配置参数.
2.1 打开Sysmac Studio,建立工程,在EtherCAT 添加SW3:

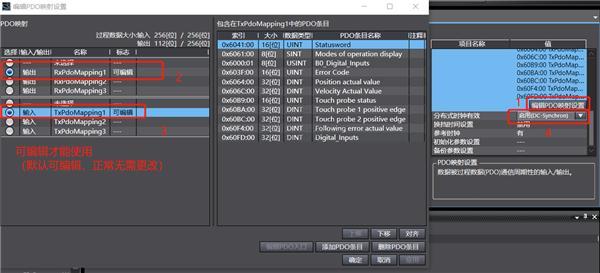
2.2 检查模式和PDO映射
2.3 在运动控制设置中添加轴控制

2.4 配置轴参数,其中红色感叹号为必要选项.

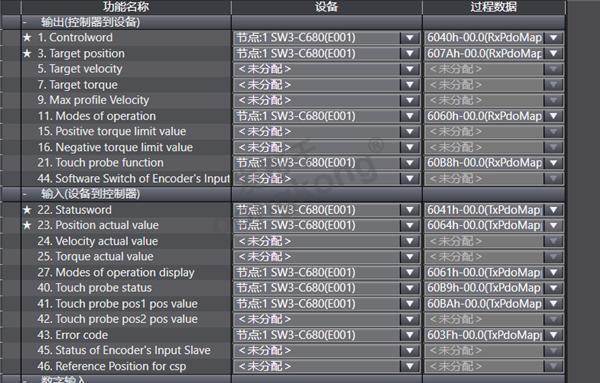
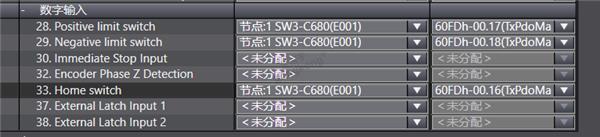
输出/输入配置
输入输出配置根据步进品牌不同,相应地址不同
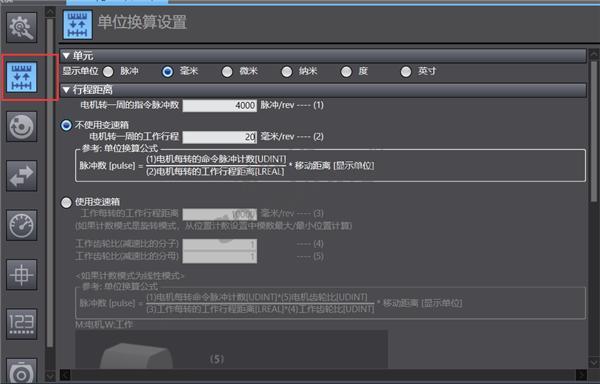
2.5 欧姆龙单位换算
根据需求设置单位换算,此例设置驱动器4000p/r(驱动器地址6092.1H),马达转1圈工件移动20mm
此设置也是根据细分转换单位(还有看是否有减速机)
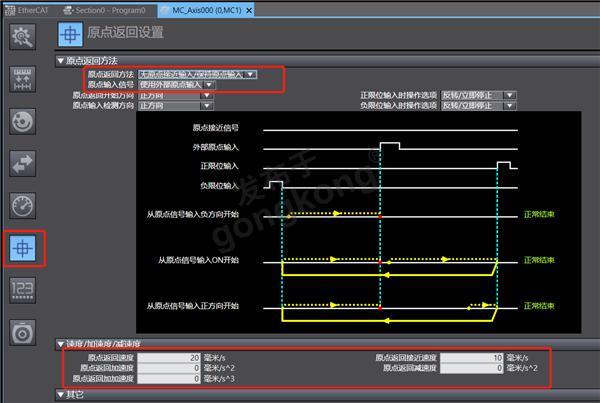
2.6欧姆龙回原方式选择:
可根据机构类型来选择回原模式(注意步进电机开环没有编码器)
3.写入站号,并将配置下载到PLC
3.1连接上PLC(能正常连接PLC)
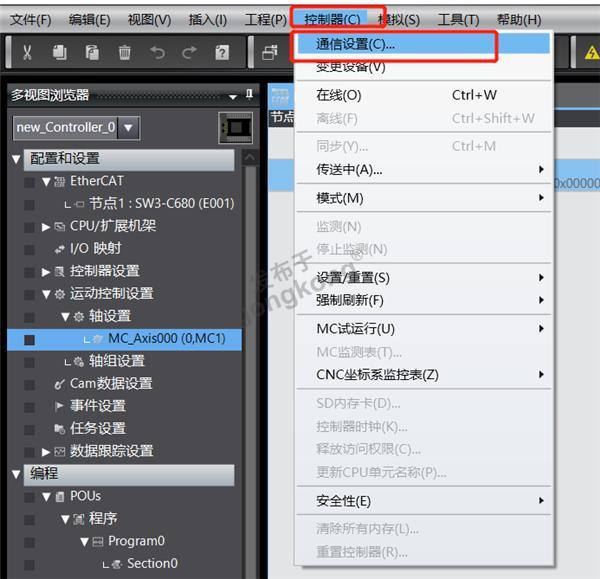
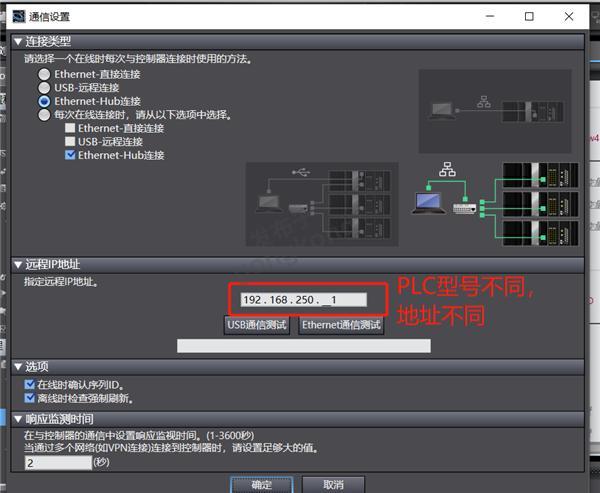
3.2点击PLC在线更改驱动器地址
回到配置界面,右键单击【主设备】,选择写入从设备节点地址并写入节点号

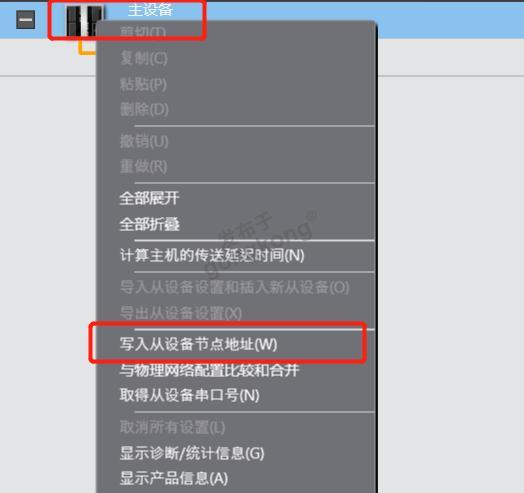
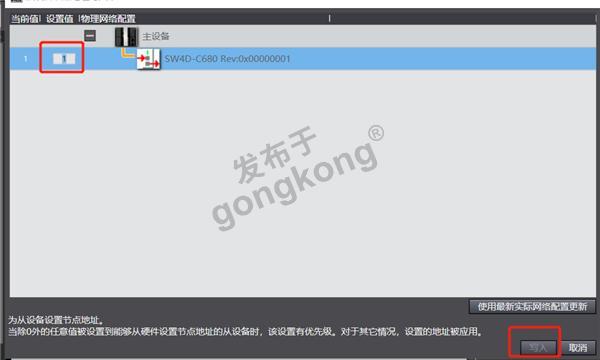
写入成功提示需要重新给从设备上电,重启驱动器后可观察到轴在线.

接下来即可写程序控制电机,可自行下载案例查看


 正在下载,请等待……
正在下载,请等待……







楼主最近还看过




- 选什么国产气动元件
 [3170]
[3170] - 7.5kw三相风机电机直接起动经...[7120]
- 什么是电子齿轮?有什么作用?...[3026]
- 皮带传动用伺服电机有问题吗...[2149]
- 什么是过度配合[3655]
- 求解伺服电机用丝杠定位?[3118]
- 求助:关于电子齿轮的作用[4222]
- 选择热缩头还是冷缩头把我害...[2168]
- 不锈钢里的铁含量是多少呢,感...[3164]
- 燃烧机如何接线[10148]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
