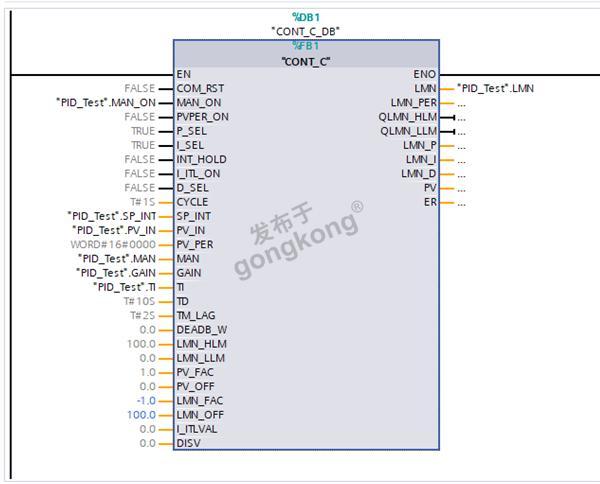
西门子CONT_C(FB41)PID指令的SCL源码 点击:2009 | 回复:5








引用 幸福的小石头 的回复内容: 楼主想表达什么呢?
-------------------------
想表达的内容是他的程序和10多年前俄罗斯人发布的程序是何等相似,连临时变量名也相同的。
俄文版FB41,各位可以抄抄然后在博图中稍微修改一下就可以了。
FUNCTION_BLOCK FB41
TITLE =
AUTHOR : SIMATIC
FAMILY : ICONT
NAME : CONT_C
VERSION : " 1.5"
//reversed by komatic
VAR_INPUT
COM_RST : BOOL ; //
PVPER_ON : BOOL ; //Чтение входной переменной с периферии включить
P_SEL : BOOL
I_SEL : BOOL
INT_HOLD : BOOL ; //Удержание интегральной составляющей
I_ITL_ON : BOOL ; //Инициализировать интегральную составляющую
D_SEL : BOOL ;
CYCLE : TIME
SP_INT : REAL ; //Внутреннее задание
PV_IN : REAL ; //Входная переменная
PV_PER : WORD ; //Входная переменная (периферия)
MAN : REAL ; //Ручной выход
GAIN : REAL
TI : TIME
TD : TIME
TM_LAG : TIME
DEADB_W : REAL ; //Ширина зоны нечувствительности
LMN_HLM : REAL
LMN_LLM : REAL ; //Нижний предел выходного сигнала
PV_FAC : REAL
PV_OFF : REAL ; //Коэффициент для корректировки входной переменной (сложение)
LMN_FAC : REAL
LMN_OFF : REAL ; //Коэффициент для корректировки входной переменной (сложение)
I_ITLVAL : REAL ; //Начальное значение интегральной составляющей
DISV : REAL ; //Возмущающая переменная
END_VAR
VAR_OUTPUT
LMN : REAL ; //Выходное значение
LMN_PER : WORD ; //Выходное значение (переферия)
QLMN_HLM : BOOL ; //Верхний предел выхода достигнут
QLMN_LLM : BOOL ; //Нижний предел выхода достигнут
LMN_P : REAL ; //Пропорциональная составляющая
LMN_I : REAL ; //Интегральная составляющая
LMN_D : REAL ; //Дифференциальная составляющая
PV : REAL ; //Входная переменная
ER : REAL ; //Сигнал рассогласования
END_VAR
VAR
sInvAlt : REAL ;
sIanteilAlt : REAL ;
sRestInt : REAL ;
sRestDif : REAL ;
sRueck : REAL ;
sLmn : REAL ;
sbArwHLmOn : BOOL ; //Выход достиг максимального значения
sbArwLLmOn : BOOL ; //Выход достиг минимального значения
sbILimOn : BOOL :=
END_VAR
VAR_TEMP
Hvar : REAL ; //Hilfsvariable
rCycle : REAL ; //Abtastzeit in real
Diff : REAL ; //
QLMN_HLM:=0; //Верхний предел выхода достигнут
QLMN_LLM:=0; //Нижний предел выхода достигнут
LMN_P:=0.0; //Пропорциональная составляющая
LMN_I:=0.0; //Интегральная составляющая
LMN_D:=0.0; //Дифференциальная составляющая
LMN_PER:=0; //Выходное значение (периферия)
PV:=0.0; //Входная переменная
ER:=0.0; //Сигнал рассогласования
sInvAlt
sRestInt:=
sRestDif:=
sRueck:=
sLmn:=
sbArwHLmOn:=
sbArwLLmOn:=
ELSE
rCycle:=
IF NOT PVPER_ON THEN Istwert
PV:= Istwert;
ErKp:=SP_INT - PV; // Получили рассогласование между заданием и входом
IF ErKp < (-DEADB_W) THEN ER:=ErKp+DEADB_W; // Если рассогласование больше зоны нечувствительности
ELSIF ErKp > DEADB_W THEN ER
ELSE ER
END_IF;
ErKp:=ER * GAIN; // Рассогласование, умноженное на кфт пропорциональности
rTi
THEN
IF I_ITL_ON
THEN
Ianteil:=I_ITLVAL;
sRestInt:=
ELSE
IF MAN_ON //
ELSE //Автоматический
Ianteil:=sIanteilAlt + Diff;
sRestInt:=sIanteilAlt - Ianteil + Diff;
END_IF;
END_IF;
ELSE
Ianteil:=
sRestInt:=
END_IF;
//---------------------------------------------------------------------------------------------
//Формирование дифференциальной составляющей
//---------------------------------------------------------------------------------------------
Diff:=ErKp;
IF (
THEN
Verstaerk:= rTd
RueckAlt:= sRueck;
RueckDiff:= rCycle
sRestDif:=RueckAlt
ELSE
Danteil:=
sRestDif:=
sRueck:=Diff;
END_IF;
//---------------------------------------------------------------------------------------------
//
IF MAN_ON // Если ручной режим
THEN
dLmn:=MAN;
THEN
IF (Ianteil > (LMN_HLM - DISV)) AND (dLmn
THEN
rVal:=LMN_HLM - DISV;
gf:= dLmn
rVal:=Ianteil - rVal;
IF rVal > gf THEN rVal:=gf; END_IF;
Ianteil:=Ianteil - rVal;
ELSE
IF (Ianteil < (LMN_LLM - DISV)) AND (dLmn
THEN
rVal:=LMN_LLM - DISV;
gf:=dLmn - LMN_LLM;
rVal:=Ianteil - rVal;
IF rVal < gf THEN rVal:=gf; END_IF;
Ianteil:=Ianteil - rVal;
END_IF;
END_IF;
END_IF;
END_IF;
LMN_P:=Panteil;
LMN_I:=Ianteil;
LMN_D:=Danteil;
sInvAlt:=ErKp;
sIanteilAlt:=Ianteil;
sbArwHLmOn:=
sbArwLLmOn:=
IF (dLmn
THEN
QLMN_HLM:=
QLMN_LLM:=
dLmn:=LMN_HLM;
sbArwHLmOn:=
ELSE
QLMN_HLM:=
IF (dLmn
THEN
QLMN_LLM:=
dLmn:=LMN_LLM;
sbArwLLmOn:=
ELSE
QLMN_LLM:=
END_IF;
END_IF;
sLmn:=dLmn;
dLmn:=sLmn
LMN:=dLmn;
dLmn:=LMN
IF dLmn
THEN
dLmn:=
ELSE
IF dLmn
END_IF;
END_IF;
LMN_PER:=
END_IF;
END_FUNCTION_BLOCK
HAVE FUN!

回复内容:
对:yuanle 引用 幸福的小石头 的回复内容: 楼主想表达什么呢?-------------------------想表达的内容是他的程序和10多年前俄罗斯人发布的程序是何等相似,连临时变量名也相同的。俄文版FB41,各位可以抄抄然后在博图中稍微修改一下就可以了。FUNCTION_BLOCK FB41TITLE ="Непрерывный PID регулятор"AUTHOR : SIMATICFAMILY : ICONTNAME : CONT_CVERSION : " 1.5"//reversed by komaticVAR_INPUT COM_RST : BOOL ; //; //Ручной режим включить PVPER_ON : BOOL ; //Чтение входной переменной с периферии включить P_SEL : BOOL TRUE; //Пропорциональную составляющую включить I_SEL : BOOL TRUE; //Интегральную составляющую включить INT_HOLD : BOOL ; //Удержание интегральной составляющей I_ITL_ON : BOOL ; //Инициализировать интегральную составляющую D_SEL : BOOL ; CYCLE : TIME T#1S; //Время выполнения блока SP_INT : REAL ; //Внутреннее задание PV_IN : REAL ; //Входная переменная PV_PER : WORD ; //Входная переменная (периферия) MAN : REAL ; //Ручной выход GAIN : REAL 2.000000e+000; //Коэффициент пропорциональности TI : TIME T#20S; //Время интегрирования TD : TIME T#10S; //Время дифференцирования TM_LAG : TIME T#2S; //Время действия дифференциальной составляющей DEADB_W : REAL ; //Ширина зоны нечувствительности LMN_HLM : REAL 1.000000e+002; //Верхний предел выходного сигнала LMN_LLM : REAL ; //Нижний предел выходного сигнала PV_FAC : REAL 1.000000e+000; //Коэффициент для корректировки входной переменной (умножение) PV_OFF : REAL ; //Коэффициент для корректировки входной переменной (сложение) LMN_FAC : REAL 1.000000e+000; //Коэффициент для корректировки выходной переменной (умножение) LMN_OFF : REAL ; //Коэффициент для корректировки входной переменной (сложение) I_ITLVAL : REAL ; //Начальное значение интегральной составляющей DISV : REAL ; //Возмущающая переменнаяEND_VARVAR_OUTPUT LMN : REAL ; //Выходное значение LMN_PER : WORD ; //Выходное значение (переферия) QLMN_HLM : BOOL ; //Верхний предел выхода достигнут QLMN_LLM : BOOL ; //Нижний предел выхода достигнут LMN_P : REAL ; //Пропорциональная составляющая LMN_I : REAL ; //Интегральная составляющая LMN_D : REAL ; //Дифференциальная составляющая PV : REAL ; //Входная переменная ER : REAL ; //Сигнал рассогласованияEND_VARVAR sInvAlt : REAL ; sIanteilAlt : REAL ; sRestInt : REAL ; sRestDif : REAL ; sRueck : REAL ; sLmn : REAL ; sbArwHLmOn : BOOL ; //Выход достиг максимального значения sbArwLLmOn : BOOL ; //Выход достиг минимального значения sbILimOn : BOOL := ; END_VARVAR_TEMP Hvar : REAL ; //Hilfsvariable rCycle : REAL ; //Abtastzeit in real Diff : REAL ; //0.0; //Выходное значение QLMN_HLM:=0; //Верхний предел выхода достигнут QLMN_LLM:=0; //Нижний предел выхода достигнут LMN_P:=0.0; //Пропорциональная составляющая LMN_I:=0.0; //Интегральная составляющая LMN_D:=0.0; //Дифференциальная составляющая LMN_PER:=0; //Выходное значение (периферия) PV:=0.0; //Входная переменная ER:=0.0; //Сигнал рассогласования sInvAlt0.0; sRestInt:=; sRestDif:=; sRueck:=; sLmn:=; sbArwHLmOn:=; sbArwLLmOn:=;ELSE rCycle:= (TIME_TO_DINT(CYCLE)) / 1000.0; //Время выполненияINT_TO_REAL( IF NOT PVPER_ON THEN IstwertPV_IN; END_IF; // Если периферийный вход отключен берем переменную из PV_IN PV:= Istwert; ErKp:=SP_INT - PV; // Получили рассогласование между заданием и входом IF ErKp < (-DEADB_W) THEN ER:=ErKp+DEADB_W; // Если рассогласование больше зоны нечувствительности ELSIF ErKp > DEADB_W THEN ERErKp-DEADB_W; // уменьшаем рассогласование на величину зоны нечуств. ELSE ER0.0; // иначе принимаем рассогласование равным нулю. END_IF; ErKp:=ER * GAIN; // Рассогласование, умноженное на кфт пропорциональности rTiDINT_TO_REAL((TIME_TO_DINT(TD)) / 1000.0; // Время дифференцирования(TIME_TO_DINT(TM_LAG)) / 1000.0; // Время действия 0.5) rTi:=rCycle * 0.5; END_IF; // rCycle THEN rTd:=rCycle; ; // rCycle * THEN IF I_ITL_ON THEN Ianteil:=I_ITLVAL; sRestInt:=; ELSE IF MAN_ON //; ELSE //Автоматический sInvAlt) * ) AND sbArwLLmOn) THEN Diff; Ianteil:=sIanteilAlt + Diff; sRestInt:=sIanteilAlt - Ianteil + Diff; END_IF; END_IF; ELSE Ianteil:=; sRestInt:=; END_IF; //--------------------------------------------------------------------------------------------- //Формирование дифференциальной составляющей //--------------------------------------------------------------------------------------------- Diff:=ErKp; IF ( MAN_ON) AND D_SEL THEN Verstaerk:= rTd (rCycle * sRueck) * Verstaerk; RueckAlt:= sRueck; RueckDiff:= rCycle rTd * Danteil RueckAlt; sRestDif:=RueckAlt sRueck + RueckDiff; ELSE Danteil:=; sRestDif:=; sRueck:=Diff; END_IF; //--------------------------------------------------------------------------------------------- // Ianteil + Danteil + DISV; IF MAN_ON // Если ручной режим THEN dLmn:=MAN; Ручной I_ITL_ON) AND I_SEL THEN IF (Ianteil > (LMN_HLM - DISV)) AND (dLmn LMN_HLM) AND ((dLmn - LMN_D)> LMN_HLM) THEN rVal:=LMN_HLM - DISV; gf:= dLmn LMN_HLM; rVal:=Ianteil - rVal; IF rVal > gf THEN rVal:=gf; END_IF; Ianteil:=Ianteil - rVal; ELSE IF (Ianteil < (LMN_LLM - DISV)) AND (dLmn LMN_LLM) AND ((dLmn - LMN_D) < LMN_LLM) THEN rVal:=LMN_LLM - DISV; gf:=dLmn - LMN_LLM; rVal:=Ianteil - rVal; IF rVal < gf THEN rVal:=gf; END_IF; Ianteil:=Ianteil - rVal; END_IF; END_IF; END_IF; END_IF; LMN_P:=Panteil; LMN_I:=Ianteil; LMN_D:=Danteil; sInvAlt:=ErKp; sIanteilAlt:=Ianteil; sbArwHLmOn:=; sbArwLLmOn:=; IF (dLmn LMN_HLM) THEN QLMN_HLM:=; QLMN_LLM:=; dLmn:=LMN_HLM; sbArwHLmOn:=; ELSE QLMN_HLM:=; IF (dLmn LMN_LLM) THEN QLMN_LLM:=; dLmn:=LMN_LLM; sbArwLLmOn:=; ELSE QLMN_LLM:=; END_IF; END_IF; sLmn:=dLmn; dLmn:=sLmn LMN_FAC + LMN_OFF; LMN:=dLmn; dLmn:=LMN 2.764800e+002; IF dLmn 3.251100e+004 THEN dLmn:=; ELSE IF dLmn -; END_IF; END_IF; LMN_PER:= (REAL_TO_INT(dLmn));END_IF; END_FUNCTION_BLOCKHAVE FUN! 内容的回复:请问您有FB58 scl的源码吗?可以分享一下吗
- 西门子PLC梯形图元件如何加注...
 [8571]
[8571] - 我来讲解两台CP1H 通讯控制7...[10070]
- 被催款了,各位工控大神有认识...[25676]
- 写个简单的PLC程序到底要几步...[9701]
- PLC控制系统设计的要点(转载...[12684]
- 西门子 编程语言scl stl 差别...[8744]
- 西门子S7-1200与基恩士扫码器...[8999]
- PLC编程做产量统计时要怎么做...[7280]
- 工控老鬼 工控人生之 在现场...[8817]
- 三菱 PLC視頻教程[8535]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
