三菱FX3UPLC如何控制松下伺服(下) 点击:803 | 回复:1

四、实现功能步骤
4.1.连接伺服驱动器

按上图所示步骤,第一步选择”与驱动器通信”,确认第二步的红框内是否是自己连接所要设置的驱动器信息,如果不是,按第三步的”更新”按钮,最后选择第四步的”OK”就可以了。
4.2.设置伺服参数
4.2.1通讯成功后,点击参数按钮。

4.2.2点击从驱动器读取,再点击ok按钮。

4.2.3点击下拉选项可以设置不同的控制模式,这里选用的是位置控制模式。
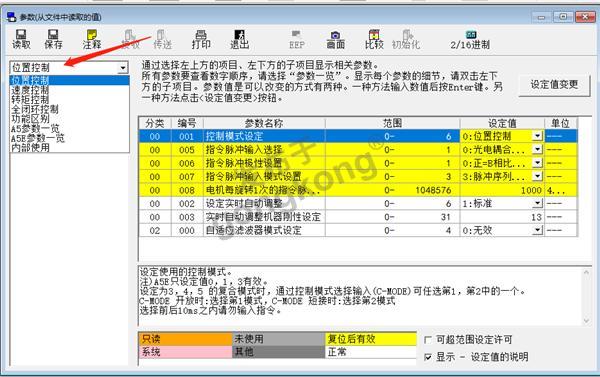

上图红框中显示的是需要设置的参数,
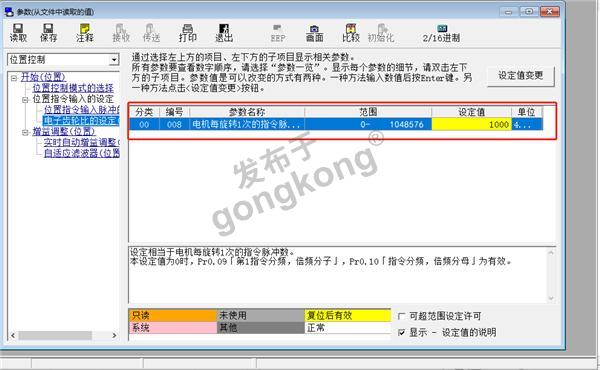
电子齿轮比需要重点设置,有关于电机的转速。

再一个就是设置电机的运行方向,在”功能区别”里找到”旋转方向设定”选项,根据所需要的方向来设定伺服的方向。
4.3.PLC程序
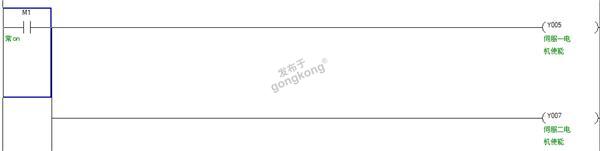
设定伺服使能,如果不给伺服使能信号,电机不能正常运转并且可以手动转动,易出现危险。
4.3.1定位指令:

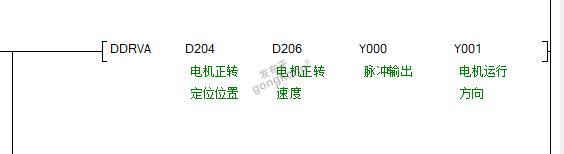
直接用plc来给伺服驱动器脉冲信号,需要使用DRVI(相对定位)和DRVA(绝对定位)指令,设定好电机的转速和位置后就可以执行电机定位运动。(使用了数据寄存器来设置位置和速度)
【详细介绍参考三菱指令编程手册】

这里的回原点指令使用了外部信号来作为近点信号和零点信号,也可以使用驱动器内部的参数设置原点位。
【详见Panasonic伺服驱动器手册】

可以设定伺服电机的报警解除信号来解除电机的报警,详见之前的配线操作。
五、项目通用性总结
5.1在控制伺服过程中,更改电子齿轮比参数就可以调节速度;在第一次动作时,速度要设置的慢一些,避免因为速度设置的过大导致伺服撞机;
5.2如果电机只往一个方向动作,要在前面板上更改参数。先按M键面板显示PR0.00时再按上下键调节Pr0.00到Pr0.06,再按S键调节参数值(Pr0.06参数设定范围0/1,出厂设定为0,如果想让其反方向旋转只需设定为1即可(当然如果开始是1,那就改为0)),调节完后按M键至面板出现EESET,长按“向上”键存储,如果面板显示finish就表明不用从新上电,ready就要重新上电。






- 单灯控制器什么品牌最好?有哪...
 [741]
[741] - 什么是防火门门磁开关[2911]
- 智能服装重大突破,浙江奇翼科...[730]
- 请问学自动化的有必要考电工...[798]
- 请组态王6.6破解版[733]
- 十张图让你看懂助粘剂用于汽...[694]
- 工业大数据的本质作用是什么...[673]
- 智能知识——从仿真的视角认识...[1440]
- 各位大哥千万别学工控[865]
- MES制造执行系统在工业4.0中...[756]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
