气动点焊工作站 点击:435 | 回复:4

发表于:2019-01-18 16:32:32
楼主
《气动点焊机器人工作项目》
项目完成后,我习惯性的总结并和大家分享,因水平有限,难免出错,还望各位前辈批评和指点。
项目确定后,责任和如履薄冰的心态使我就像上了发条的陀螺开启了连续加班的工作状态。
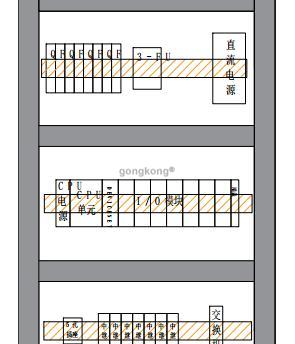
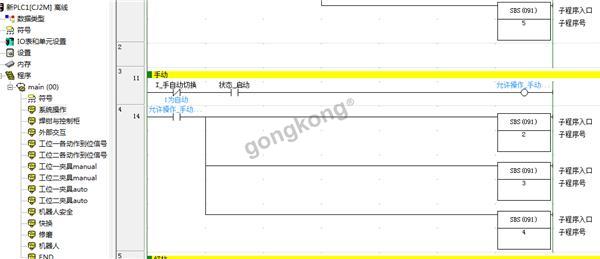
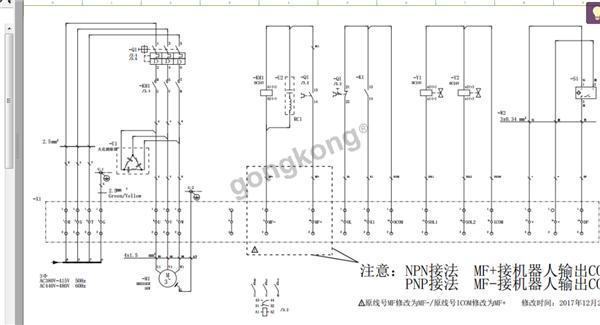
机器人工作站不仅要保质完成,还要保证产品的自主性,所以前期的工作不仅从机器人工作站设计方案、电气原理图、布局图设计、电气元件、辅料采购清单统计和电气硬件装配、配线、上电检验开始准备,更是将ENTERNET\DEVINET通讯、PLC编程、机器人的设定和示教也进行了细致的准备和考虑,为后续调试提供了重要帮助。
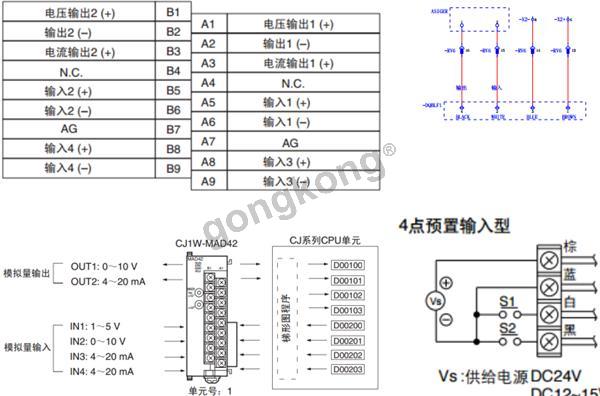
中期,采购件到位后,进行了马不停蹄的现场安装,非标+新产品,各个环节难免出现问题,解决问题成了重中之重,从实物与图纸的不一致到机器人示教时的干涉、从甲方意见的变化到调试时产生新的技术要求,从通讯时出现的怪异问题到模拟量模块的bug等,一一克服解决,为项目制造积累了宝贵的经验。
后期机器人工作站调试、连续拷机运行完成,紧接着就是拆掉打包装,为了方便和快速的在客户现场安装,18根航插电缆的设计和标签对应,让现场布局、安装、调试都极为便利,最后并总结了《气动点焊机器人工作站电气部分实施细则》,为下一个机器人工作站项目的更加完善而准备。
自动设别工装和夹具,为客户提供更好的体验的奋斗!
提前祝各位同仁新年快乐,万事如意。写于2019年1月18号。
下面上传照片:

 正在下载,请等待……
正在下载,请等待……


下载附件需4积分!







热门招聘
相关主题
- abb机器人如何在程序中旋转第...
 [1833]
[1833] - 使用机械手的原因[1024]
- 求教 OTC AX21 焊接机器人E0...[4478]
- 求助:机器人控制柜的RS232通...[899]
- 机器人长期断电,你怎么处理的...[1401]
- 机器人应用领域的多变性[1130]
- 工业机器人国家标准[1225]
- 武汉工业4.0与工业机器人技术...[1085]
- 川崎kroset软件下载谁有[1746]
- 同学们发新书了——不要抢都有...[2778]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
