多工位、多功能、多相机并行处理视觉案例 点击:1056 | 回复:4

发表于:2019-01-16 12:00:25
楼主
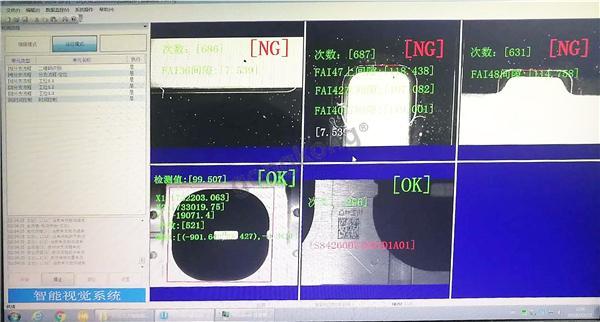
一、视觉定位+尺寸测量+二维码读取
◇ 系统构成:
▪相机:4个
▪测量精度:±0.02mm
▪测量精度:±0.05mm
◇ 系统功能:
相机1:定位大NC的位置,将位置偏差值发送给XXY平台
相机2:读取喷码机喷出二维码。
相机3: 测量贴合后大NC的尺寸
相机4:测量贴合后大NC的尺寸
喷码机软件:从MES系统获取二维码,将二维码发送
此方案从定位、尺寸测量、二维码识别五个工位同时触发,并行控制,并上传MES系统
.jpg")
.png")
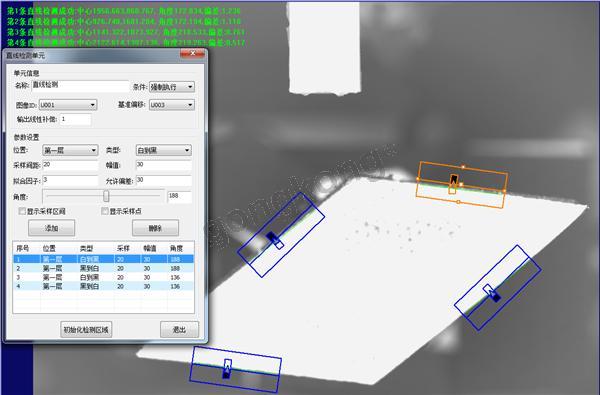
二、尺寸测量+视觉定位视觉系统
◇ 系统功能:
工位1:测量金属棒的直径大小,当不满足公差范围时,控制气缸将其剔除。
工位2:同时定位金属棒和胶皮的位置,将两者的相对距离和角度发送给机械手,使胶皮边缘准确的对齐贴合在金属棒边缘

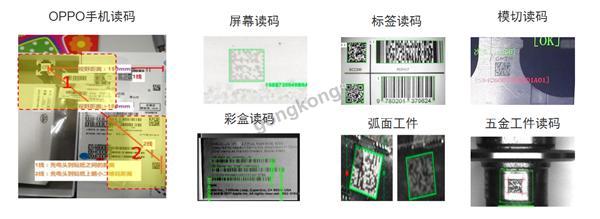
三、条码读取视觉系统
◇ 系统功能:
▪识别流水线上,电源适配器上的条形码,将识别内容传给MES系统。
▪识别条码过程中,如果出现条形码不能识别的情况,需输出NG信号,输出到外部。
▪电脑显示器条码识别成功率显示。

四、背光源定位贴合视觉系统
◇ 系统构成:
▪相机:20个
▪像素:600w
▪精度:±0.05mm
▪机器人:单臂4轴
◇ 系统功能:
▪扩散、增光1、增光2和遮光等膜材依次贴到半成品上面。
▪定位产品的角边,检测膜材和半成品的位置,精确定位
▪根据产品位置的变化,计算出偏移量,将偏移量传送给机 械手,移动校正,实现贴合。









热门招聘
相关主题
- 求助透明物体检测
 [995]
[995] - 求助:KEYENCE(基恩思)CV-300...[2413]
- 关于透明物的检测[971]
- BANNER公司视觉介绍[1459]
- 視覺系統CCD特征[1336]
- 二值化起什么作用[2012]
- 2013机器视觉成功案例---交流...[1482]
- 求助:视觉方案的合作厂家[1110]
- 请问一套机器视觉系统是多少...[14635]
- 漏涂检测[1021]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
