解决问题:智能车系统解决方案 点击:303 | 回复:2

解决问题:智能车系统解决方案
本设计方案献给所有与我一样独自奋战的车友们,愿你们少走弯路。本四旋翼方案可能是最简单的可行方案,主要是根据发光源的大小来区分前后车灯与信标。旨在起到抛砖引玉的作用,也希望大神提出改善的建议。资料在闯客网技术论坛下载
整个系统分为悬停半空的摄像头识别系统和地面的智能车控制系统,这两个系统均采用MKL26Z256VLL4作为核心控制单元。半空中的识别系统通过模拟摄像头OV5116获取地面信标的位置和智能车的相对位姿,经过图像处理得到智能车相对于信标的偏移角,并将数据通过蓝牙通讯的方法传递到地面受控智能车;
智能车系统主要由舵机、驱动直流电机、电机驱动电路、电源稳压电路、测速电路以及其他电路构成;智能车系统通过蓝牙接收到的偏移角调整控制舵机的输出脉冲,以此达到修正舵机打角的效果;速度控制由智能车系统通过驱动电路控制电机的转速控制来完成。通过转向控制与速度控制,车模可以自主靠近信标,完成任务。
资料在闯客网技术论坛下载
2总体方案设计
2.1 嵌入式系统结构层次
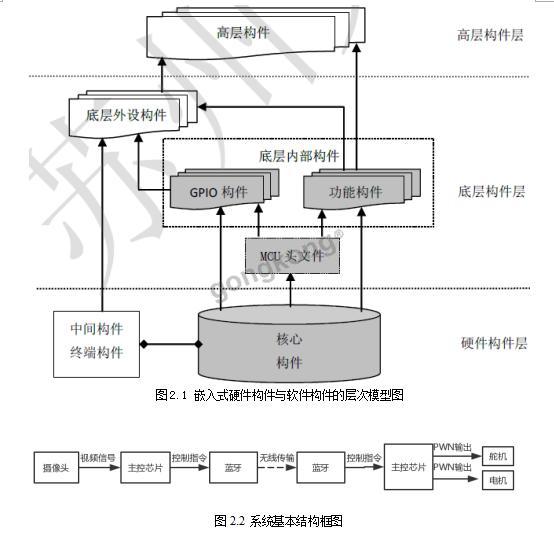
嵌入式软件构件(Embedded Software Component, ESC)是指能够实现一定嵌入式系统功能的一组封装的、规范的、可重用的、具有嵌入特性的软件单元,是组织嵌入式系统的功能单位。 嵌入式软件构件包括高层软件构件和底层软件构件。虽然高层构件与硬件无关,但是底层构件与硬件紧密联系,它把硬件驱动程序封装起来,为高层软件构件访问硬件提供接口。在硬件构件中,MCU(微控制单元)的最小系统由核心构件组成。通常,MCU内部包括了一些通用的输入输出端口和内置功能模块,通过底层构件可以将通用输入输出端口的驱动程序封装为GPIO构件,将各内置功能模块的驱动程序封装为功能构件,如A/D转换构件、串行通信构件、定时器构件等。
在硬件构件层中,对于核心构件来说,终端构件和中间构件都是作为它的外部设备,底层外设构件是指由这些外部设备的驱动程序封装而成的软件构件。需要指出的是,并不是所有的终端构件和中间构件都可以作为直接编程的对象。例如:键盘、LCD等硬件构件的逻辑电平转换硬件电路就与编程无关,因此没有相应的底层驱动程序,从而也就没有相应的软件构件。嵌入式系统的软件构件与硬件构件的层次模型如图2.1所示。
2.2 控制方案介绍
该设计要求课题悬停在半空的摄像头采集系统能够准确识别信标和车模的相对位置,因此整个系统由摄像头采集系统和智能车控制系统两大部分组成,两部分系统均以KL26作为主控制芯片,并通过无线蓝牙通讯的方式进行数据传输。系统基本结构框图如图2.2所示。





- 应该学VB6.0还是学VB.NET
 [4990]
[4990] - 力控6.0组态软件IO通讯专栏[6488]
- 工控初学者不要“太贪”[3155]
- 如果是你,亚控,力控,紫金桥,...[3896]
- ODBC数据库函数的使用[2189]
- 分享一个软件-SMC气路图绘制[13075]
- 什么叫闭环的时间常数?[5642]
- NuDAQ PCI数据采集卡现在提供...[2568]
- SMEMA标准通信及接线图[8994]
- ab plc中文指令集[3178]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
