PLC自整定PID功能 点击:8264 | 回复:29

【关键词】 PLC,PID,自整定,闭环控制
1. 引言
现今在工业生产过程中常要用闭环控制方法来实现温度、速度、压力、液位等的模拟量控制。而现在估计有90%以上的闭环控制采用PID(Proportional-Integral-Derivative)控制器,因为PID控制不需要被控对象的数学模型。且PID控制结构简单,容易实现,有较强的灵活性和适应性。PID控制中的一个至关重要的问题是控制器的参数整定问题(即比例系数、积分时间、微分时间)的整定。
现在已有很多PLC厂家提供具有PID控制功能的产品,例如PID闭环控制模块、PID控制指令和PID控制系统功能块等,它们使用简单方便,只需要设置一些参数即可。矩形科技PLC的PID指令向导PID指令应用更加的简单方便。
1. 自整定功能介绍
使用PID功能时最头痛就是设置KP、KI、KD这三个参数,参数是否合理直接影响了PID运行后输出的结果,严重时等于没使用PID甚至更为严重,这对现场用户来说是莫大的痛苦。带自整定的功能PID功能可以轻松为用户解决这一问题,用户只要开启外部负载正常运行,开启PID的自整定功能,PID自整定完成后产生KP、KI、KD三个参数,用户可直接使用这三个参数即可,非常方便好用。
2. 矩形科技自整定PID功能
? 一个PID功能块包含了自整定功能,和PID运算功能;
? 整方法包括:继电法,单位阶跃响应法;
? 应用程序可以通过该指令实现一路或者最多32路的自整定和PID运算功能;但是任意一路在任何时刻只能处于自整定或PID运算两种功能模式中的一种;
? 该指令可以实现多段控制,且控制段数不限制;
3. PID运算功能
PID运算开启;PID运算公式采用经典数字PID中的位置式PID公式;公式如下:
Xout = KP×e(t) + (100/ TI)×∫e(t)dt + (TD/100)*de(t)/dt + Bias
其中Xout 为PID计算输出,KP为比例系数,TI为积分系数,TD为微分系数,Bias为基准输出值,
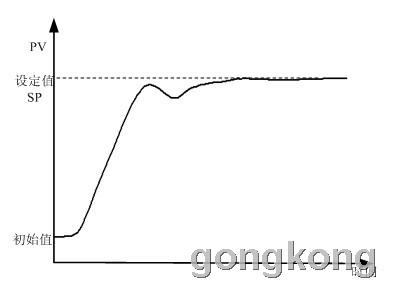
PID控制的实际效果图如下:
 正在下载,请等待……
正在下载,请等待……









- 请教台达plc 高速计数器现在...
 [8740]
[8740] - FX3U-3A-ADP 的模拟量模块怎...[8933]
- 编程技巧展示:为一求助帖用S...[7172]
- 1m水柱压力是多少帕?[46187]
- 我来讲解两台CP1H 通讯控制7...[10070]
- 永宏PLC技术大论坛[22900]
- 修工控网站发布修“活儿”任务...[7174]
- (已结束)工控PLC擂台第2期--...[8999]
- (已结贴)PLC擂台第112期——谈...[8393]
- (已结束)工控PLC擂台第18期-...[10980]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
