电子齿轮比(CMX/CDV)的计算及其意义 点击:10759 | 回复:214

电子齿轮比(CMX/CDV)的计算及其意义
刘志斌 2012.03.21
已知:
1)上位机发出脉冲能力为200Kp/S,200×1000/s,200×1000×60/min;
2)电机额定转速为3000R/ min,3000/60s;
3)伺服电机编码器分辨率是131072;
4)丝杆螺距是10mm;
求:
1、电机额定转速运行时的电子齿轮比?
2、如果电子齿轮比是1,伺服电机的转速?
3、生产时,设定指令脉冲当量,确定电子齿轮比?
解:
1、当上位机满额发出脉冲时,伺服恰好额定速度运行:
1)电机额定转速为3000r/ min,3000r/60s=50r/s;
2) 伺服电机编码器分辨率是131072;
3)电机额定转速时编码器输出检测反馈脉冲频率是131072×50r/s;;
4)上位机发出脉冲能力时发出的脉冲频率=200×1000/s;
5)当上位机满额发出脉冲时,伺服恰好额定速度运行,这时的电子齿轮比:
电子齿轮比=反馈脉冲频率/上位机满额发出脉冲频率
=(131072×50r/s)/ 200×1000/s
=6553600/200000
=32.768
2、如果电子齿轮比是1:
1)上位机发出的1个脉冲=编码器输出检测反馈的1个脉冲:
2)上位机发出脉冲能力时发出的脉冲频率=200×1000/s;
3)伺服电机的转速是=200×1000/s×60/131072= 91.55 r/min
3、如果丝杆螺距是10mm,
1)要求上位机每发一个指令脉冲,工件移动0.001mm,即指令脉冲当量为0.001mm,也可以说指令脉冲单位为0.001mm:
2)如果伺服转一周,丝杆转一周,减速比是1;
3)丝杆转一周,上位机应该发出的指令脉冲为10mm/0.001mm=10000(个);
4)伺服转一周,编码器检测反馈脉冲为131072(个);
5)电子齿轮比=编码器检测反馈脉冲/上位机发出的指令脉冲=131072/10000=13.7012;
反馈脉冲:伺服电机编码器的解析度,伺服本身的脉冲。
指令脉冲:上位机发出的脉冲;也可以说是外部给定脉冲。
脉冲当量:伺服接受上位机发出的每一个脉冲信号的位置移动量,又称作最小指令设定单位。
CMX :电子齿轮比的分子是电机编码器反馈脉冲。
CDV :电子齿轮比的分母是上位机的给定脉冲(指令脉冲)。
电子齿轮比:是用来把上位机的给定脉冲要换算成与电机编码器反馈脉冲同等意义,以便控制中心按给定指令要求控制伺服转动定位;





楼主最近还看过
正弦编码器的刻线排列、检测正弦波形、解析4倍频的结构和原理
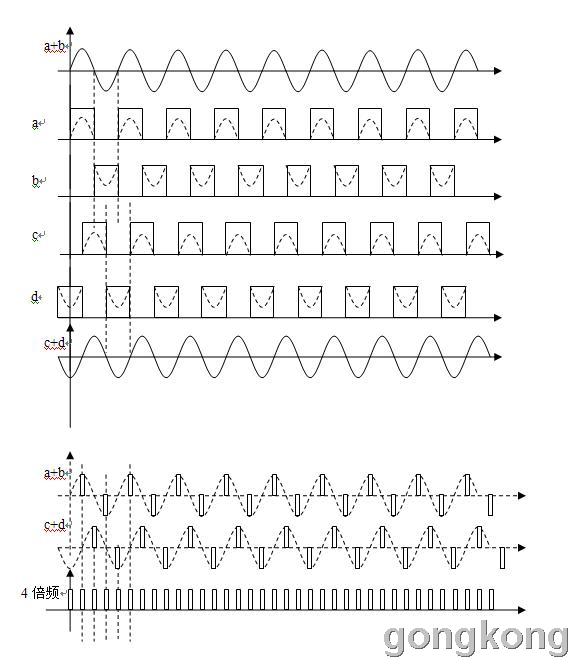
如图:
1、正弦编码器的刻线参数和排列规则:
1)刻线宽度与刻线间隔相等;
2)有4条相同刻线数的刻线a、b、c、d,排列方法如图所示;
3)a、b(或c、d)刻线与间隔错开;
4)a、c错开90°
2、检测波形的合成:
1)每条刻线检测到的模拟信号强度是正弦波形的半周;
2)a+b合成正弦波形,c+d合成正弦波形,两个正弦波形互差90°;
3、4倍频解析脉冲形成原理:
1)每个刻线的正弦半波,整理产生1个方波脉冲;
2)4条刻线解析合成4倍频方波脉冲;

 c
c


刘工,你好!
我看了你和笨鸟慢飞的精辟观点,不胜敬佩!我是初学,我对48楼还有2个问题想请2位高手指点!
1.解1)电子齿轮比=1048576/65536=16, 现想问一下这个65536是怎么来的?
2.已知中的最高線速度 20m/min , (1/3)mm/s ,现想问一下这个(1/3)mm/s是怎么来的,应该是20X1000MM/60=1000MM/3=1M/3才对呀, 这个数据会不会影响你以后的解题答案呢?
弱弱地问一下,让您见笑了!
已知
1)PLC頻寬用100KHz
2)電機用三菱 20位 ,编码器解析度=131072×8=1048576;
3)最高線速度 20m/min , (1/3)mm/s
4)絲桿螺距 10/3mm
5)減速比 5
6)行程 1.8m
7)定位精度 0.01mm
解
1)电子齿轮比=1048576/65536=16;
2)丝杆转一周的时间=絲桿螺距 10/3mm÷線速度(1/3)mm/s=10s
3)电机转一周的时间=10s÷5=2s ,要求电机转速=0.5r/s
4)上位机工作频率= 0.5r/s×65536=32.768khz
5)指令脉冲单位1/(32768×3)(mm)
7)运行时间 1800mm÷(1/3)mm/s =5400s,运行时间大于5400s
8)定位精度 0.01mm
丝杆控制精度=0.01mm÷10/3mm=0.003周
电机控制精度= 0.003周×5=0.015周
频率控制精度=65536×0.015周=983.04

引用 笨鳥慢飛 的回复内容:
……同步電機的極相 正是由帶有UVW的編碼器來告知 驅動器 在驅動器的速度環模式下 可以很精確的控制電機角位移 連電機的加減速都可在驅動器來設定 ……
1、你今天能由此发言,算你进不了一大截;
2、再回头看看,笨鳥慢飛 对这些一无所知的过去的发言:
http://bbs.gongkong.com/Details/201203/2012031219583900002-1.shtml



 完全看不明白,怎么回事的!
完全看不明白,怎么回事的!- 变频器在使用当中出现过电压...
 [428]
[428] - 三相异步电动机绝缘电阻偏低...[1459]
- 集中式与分布式过程安全控制...[2226]
- 电机绝缘电阻低的原因及处理...[1689]
- PID控制,里面有内部PID给定和...[3362]
- 数控等离子切割机切割断面倾...[497]
- 三菱FX2N与台达VFD-B变频器通...[686]
- 怎么用plc程序设置触摸屏的密...[5634]
- 全自动点胶机操作注意事项[412]
- 英语在自动化行业的重要性[746]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
