伺服电机控制大型圆盘转动的相关计算 点击:14360 | 回复:17

J=1/2Mr^2=0.5×2000×1.25×1.25=1560Kgm^2
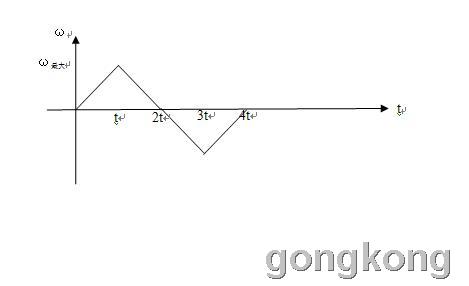
2、“转盘5秒内做一往复圆周运动”,是往返1周:
1)匀加速、匀减速对称,电动机电动、发电功率相同,正转和反转相同,这样5秒的正反转1周可以看成
0.5周/1.25秒×4;
2)由于角位移θ、角加速度β、时间t的关系是:
3)转矩T、角加速度β、转动惯量J的关系是:
T=Jβ
4)所以拖动转盘的转矩T为
5)将θ=π、t=1.25秒、J=1560Kgm^2代入得
T=1560Kgm^2×2π/(1.25秒)^2
=6240Nm
3、拖动圆盘的功率
1) p=Tω
2)由于ω是由零到最大匀加速或匀减速运转的,所以电机的功率由零到最大再到零均匀变化;
3)最大角速度ω=βt=2θ/t=2π/1.25=5弧度/秒
4)所以拖动圆盘的最大功率Pm
Pm=Tω=6240Nm×5弧度/秒=31200w=31.2KW
4、如果系统的机械效率是1,那么电机运行的最大功率是31.2KW;
5、电机的功率基本定下来了,电机的额定转矩、额定转速,与系统机械转动比有关系:
1)如果电机直接拖动圆盘,那么电机的额定转矩T=6240Nm;
2)如果电机直接拖动圆盘,那么电机的速度是由零到最大变速运动:
最大速度=最大角速度ω=βt=2θ/t=2π/1.25=5弧度/秒=0.83转/秒=50转/min;
3)如果传动比是10,那么电机的额定转矩就是6240Nm÷10,最大转速是50转/min×10;
4)传动比由你设计,电机功率一定,最大功率是31.2KW,电机转速、额定转矩由传动比换算;
1)θ为往返一个角位移的1/2:
例如往返一周,θ=π;
例如往返半周,θ=π/2
2)t为往返一个角位移所需要的时间的1/4:
例如往返一周5秒,则t=5/4秒=1.25秒;
例如往返一周10秒,则t=10/4秒=2.5秒;
3)J为圆盘转动惯量,可根据其几何形状套用不同的公式计算之;
2、这个公式是把圆盘往返一个运动周期的运动分成正转加速、正传减速、反转加速、反转减速4个完全对称的分段运动,认为它们具有相同大小的转矩T、相同大小的角加速度β、相等的时间t
3、转矩T确定,最大转速ω×转矩T=电机的最大功率;
其中最大转速ω=βt=2θ/t
4、如果传动效率是1,可认为直接拖动圆盘的功率=电机不同传动比时的功率
例如
电机直接拖动额定转速是50转/分,你可以选择传动比60,电机额定速度是
50×60=3000转/分;
这时电机的额定转矩6240Nm÷60=104Nm,
而电机的额定功率还是31.2KW不变;
对你的系统一点儿建议:
1、建议你的系统采用:
PLC+位置开关+变频器
2、正反转加减速由变频器完成;
3、正反转往复运动控制由位置触点开关+PLC来完成;
4、这样系统非常简单明了安全可靠,运行调试十分方便!






引用 ShowMotion 的回复内容:
你要么维持转速,选大功率,要么选小功率,必须降低转速……
1、由转矩公式知道,如果往复运动的周期扩大2倍变成10秒,那么力矩会减小到原来的1/4;
2、由最大角速度公式 得出,如果往复运动的周期扩大2倍变成10秒,那么最大角速度是原来的1/2;
得出,如果往复运动的周期扩大2倍变成10秒,那么最大角速度是原来的1/2;
3、这样电机的额定功率会下降到31.2KW×1/4×1/2=4KW;
4、这样电机的额定速度也会下降到原来的1/2,例如额定转速3000转/分可以下降到1500转/分;
5、所以系统往复运动的周期选择,对电机的功率、额定转速有很大的作用,例如周期扩大2倍到10秒,电机的功率会下降到1/8,额定转速会下降到1/2;
引用 ShowMotion 的回复内容:
圆盘的转动惯量=mD^2/8=2000*2.5*2.5/8=1563kg.m^2;折算到电机的转动惯量=1563/(40*40)=0.98kg.m^2.……
1、在计算时,有关“折算到电机的转动惯量”的说法和公式,是没有必要的;
2、机械传动就是“杠杆原理”,我们只管算出运动体的转动惯量J、角位移θ、角加速度β、角速度ω、转矩T、机械功率;
3、然后根据机械传动的“杠杆原理”:
(转矩÷传动比)×(角速度×传动比)=机械功率=电机功率/机械效率
4、这样使得计算简明,原理概念清楚,各个物理量关系明确!
引用 ShowMotion 的回复内容:
引用 刘志斌 的回复内容:5、所以我们做计算时,只需要计算运动体运动需要的力矩、速度、功率;6、然后根据传动比轻松地计算出电机的力矩、速度、和功率;7、不需要进行转动惯量的轴与轴之间的折算!刘老师:要您不要下结论,您肿么不听劝呢?难道仅仅是我数次反驳过您??伺服电机的转动惯量是一个很重要的指标,您你是不是又当成工频电机考虑了???您知道伺服电机有惯量范围这一说吗????折算是一定的,不管你是折算惯量、力矩、还是转速,最终都要落在电机上,对选型都是重要依据。
1、伺服电机的转动惯量是一个很重要的指标;
2、伺服电机的转动惯量,不是运动体的转动惯量;
3、伺服电机的转动惯量,可以分别计算,与负载惯量计算无关,与负载运动参数无关,你选什么电机负载都要按要求去运动;
4、例如载重汽车拉货,货物是一定的,你选什么车货物的运动是一定的,车的自重另计算;
5、我说的是运动体的转矩、速度、功率,与你说的电机转子的转动惯量需要的转矩、速度、功率,是两回事,分别计算就是了!
7、看看你的计算过程和结果:
圆盘的转动惯量=mD^2/8=2000*2.5*2.5/8=1563kg.m^2;
折算到电机的转动惯量=1563/(40*40)=0.98kg.m^2.
这个惯量可不小啊,
大盘5秒一次往返圆周,相当于2.5秒一圈,并且是先加速后减速;
伺服2.5秒完成40圈先加速后减速,相当于1秒钟完成16圈的先加速后减速,折算成最小的平均速度960圈/min,最小的加速度是前0.5秒转到1920,后0.5秒1920到0转。最小加速度=3940转/min/s=65.7转/s/s=65.7*2*3.14=413.
最小的加速力矩T=J*a=0.98*413=405牛米,电机扭矩不小。
按照大电机的常规转速1500转/min,25转/s;
电机功率=405*25*2*3.14=63.585kW

引用 笨鳥慢飛 的回复内容:
……當電機與旋轉台直傳(減速比=1) 電機的慣量=系統整個慣量當電機與旋轉台(減速比=10) 電機的慣量 X 100=系統整個慣量上面這兩具話只告訴你電機輸出的旋轉慣量會因加上減速機 后 所增加的慣量與減速比成平方正比符合 "電機的慣量 X (5---20) >=系統整個慣量" 選用電機的慣量與系統整個慣量才是匹配……
1、所谓惯量匹配,是指电机转子的惯量与负载惯量之间的关系;
2、什么算匹配,这与碰撞理论一致,当两个惯量相同的物体发生碰撞时,则会发生一个物体的动量状态完全传递给另一个物体,我们称此种现象为惯量匹配;
3、什么叫不匹配,这与碰撞理论一致,当一个物体与另一个惯量相比无穷大的物体发生碰撞时,则会发生这个物体的动量状态翻转,而惯量无穷大的物体运动状态不变,我们称此种现象为惯量不匹配;
4、所以电机的转动惯量与负载的转动惯量相等时(传动比=1),为惯量匹配;
5、如果传动比=10,那么电机的转动惯量等于负载折算到电机轴的惯量(负载惯量/100),为惯量匹配;
6、可是电机的转子惯量不可能做得那么大,而且转子惯量大,增大了电机动力的无用负荷,所以一般规定负载惯量与电机惯量的比在一定范围内,例如笨鸟说的(5~20)
7、电机转子与负载惯量之间的匹配与转子与负载之间的连接是柔性连接还是刚性连接有关;
8、一般原则是负载惯量大电机转子的惯量大,反之,负载惯量小要求电机转子的惯量也小;
9、一般情况下,电机转子的惯量远小于负载惯量;
- 我昨天用siemens plc 做的一...
 [4322]
[4322] - 变频器翻译成英文是inverter...[24278]
- 这台冲压机器人比国产六轴机...[1787]
- 需要PLC学习资料请进[1857]
- 见过高压触电吗?高压触电瞬间...[4666]
- DO在电气元件中是什么意思[1806]
- 200米、300米、400米、500米深井...[2199]
- 你知道伺服的位置环是怎么构...[2386]
- 工程英语[7538]
- ACB、MCB和MCCB具体有什么区别...[2823]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
