伺服脉冲当量的计算方法 探讨。 点击:2175 | 回复:8

伺服脉冲当量的计算方法 探讨。
伺服脈衝當量的定義計算法
劉志斌发表于 2012/3/17 14:05:20
1、如果认为“脈衝當量”的脉冲,是电机输入的驱动脉冲,也就是与伺服步进的一个步距相对应的脉冲;
2、那么脉冲当量,就是伺服电机每输入一个驱动脉冲,转过一个步距,工件平移的距离;
3、所以脉冲当量可计算如下:
1)减速比=伺服的转数/丝杠的转数;
2)工件平移的距离=螺距×丝杠的转数;
3)工件平移的距离=螺距×伺服的转数/减速比
4)伺服的转数=伺服输入的驱动脉冲/伺服每转一周的驱动脉冲数;
5)工件平移的距离/伺服输入的驱动脉冲=螺距/(减速比×伺服每转一周的驱动脉冲数);
6)脉冲当量= 螺距/(减速比×伺服每转一周的驱动脉冲数)
4、驱动脉冲数是多少?
1)驱动脉冲数=伺服转数×伺服每转一周的驱动脉冲数
2)电子齿轮比=驱动脉冲数/控制脉冲/;
3)驱动脉冲数=控制脉冲×电子齿轮比;
4)伺服每转一周的驱动脉冲数=伺服每转一周控制脉冲数×电子齿轮比;
5)脉冲当量=工件平移的距离/伺服输入的驱动脉冲
=螺距/(减速比×伺服每转一周控制脉冲数×电子齿轮比)
5、“脈衝當量=螺距/ (傳動比 X 編碼器解析度 X 電子齒輪比”是错误的:
1)脈衝當量与编码器的解析度无关;
2)脈衝當量只与丝杠的螺距、减速比、电子齿轮比、伺服每转一周控制脉冲数有关!
3)举例说,伺服的极对数不同,“当量”会不同的!
4)按照笨鸟的说法,当量与伺服没有关系的!
5)编码器的脉冲对控制脉冲只是个反馈的关系,与“当量”没有关系!
1、电机旋转一周的脉冲数到底怎样去计算?
1)编码器的分辨率为131072,所以伺服转一周编码器输出131072的检测脉冲;
2)如果丝杠的螺距为5mm,要求输入一个指令脉冲时,工件位移0.001mm,那么要求伺服转一周需要输入的指令脉冲数为
5mm/0.001mm=5000
3)就是说,我们需要伺服转一周时,输给主控器的指令脉冲是5000个,每输入一个指令脉冲工件精确移动0.001mm;
2、电子齿轮比:
1)我们输入5000指令脉冲,伺服电机转一周,编码器转一周,输出131072个脉冲;
2)这样伺服转一周,编码器输出的检测脉冲与我们输入的指令脉冲的比131072/5000,这个比就叫做电子齿轮比;
3)我们输入一个指令脉冲,工件移动0.001mm,叫做指令单位,或者叫做指令脉冲当量;
3、我们在伺服操作控制时:
1)我们要先确定脉冲指令单位,或者叫指令脉冲当量,就是每输入一个指令脉冲,要工件移动多少!
2)指令脉冲当量(脉冲指令单位),是用户自主决定的,例如你可以确定为0.001mm,也可以确定为0.0001mm;
3)然后确定计算出伺服转一周,你需要输入多少指令脉冲,因为丝杠转一圈,工件平移一个螺距,这样伺服转一周输入的脉冲是:
伺服转一周输入的脉冲=螺距/(脉冲当量×减速比) (减速比=伺服转数/丝杠转数)
4)这样也就确定了电子齿轮比:
电子齿轮比=编码器解析度/伺服一周的指令脉冲
5)有了这个电子齿轮比,控制器就知道我们输入的指令脉冲与编码器检测的脉冲之间的换算关系了:
编码器的脉冲=电子齿轮比×指令脉冲
6)例如,我们要工件移动10.001mm,我们就输入指令脉冲数为
输入指令脉冲数=工件给定移动量/指令单位=10.001mm/0.001mm=10001(个)
7)控制器将其换算成编码器的脉冲:
编码器的脉冲=电子齿轮比×指令脉冲=(131072/5000 ) ×10001(个)
8)伺服运转,当编码器输出=(131072/5000 ) ×10001(个)脉冲时,自动停车,按要求工件移动10.001mm;
4、伺服主控器的其它控制作用:
1)当要工件移动的距离很大时,也就是控制器从你输入的指令脉冲计算分析出,伺服需要转动很多转才能到达目的地时,伺服控制中心会自动提高私服的转速,高速运行,当快到达目的地时,伺服速度会自动减小,缓慢到达目的地后停车;
2)也就是说,伺服控制的过程是 启动→加速→高匀速→减速→制动→停车;
3)当要工件移动的力矩平稳、大、小时,伺服控制中心还会自动控制电机电流,以适应力矩的控制要求;
4)控制中心检测电流大小,可以知道负载是否过载、重载或故障短路等,适时进行失速调节、报警、保护等;
5、伺服控制系统对伺服电机的要求:
1)一般功能:启动、停车制动、正反转;
2)调速的功能,速度闭环;
3)转矩控制功能,电流闭环;
4)最重要的功能是,在指令脉冲上准确启动或停车,例如指令脉冲是10001时,能在基点0精确启动,能在第10001个指令脉冲是精确停车!
6、讨论:
1)世界上有没有能在指令脉冲上准确启动、停车的电机或操作方法?
2)例如以上讨论的伺服理论,要求电机能在一个指令脉冲时准确转过1/10周、1/100周、1/1000周、1/10000周……
回复 举报 收藏 评分
標題怎不見 (板主 是否能幫我修改)
解毒劉志斌的伺服步進理論(一)伺服脈衝當量的定義計算法
笨鳥先做個拋磚動作
1、如果认为“脈衝當量”的脉冲,是电机输入的驱动脉冲,也就是与伺服步进的一个步距相对应的脉冲;
伺服與步進在劉大師的理論 是二合一 那我要採用全閉還控制 那劉大師不就葛屁了
預告下個懸賞200分的題目 | |
1、编码器与上位机的电子齿轮伺服精确控制理论,为了提高所谓的指令脉冲当量或者叫指令脉冲单位的精确度、分辨率、解析度,就在编码器上下功夫; 2、编码器的刻线是有限,不可能达到131072这样的数量级; 3、这个理论,就把编码器输出的脉冲用倍频的方法,把几百个或者几千个有限的编码器实际输出的脉冲任意扩大几十倍变成十几万的反馈脉冲; 4、如果编码器的刻线是1000,每转一周,实际输出1000个反馈脉冲,100倍频后变成100000个反馈脉冲; 5、就是说,编码器每输出1个脉冲,实际反馈的是100个脉冲,当编码器实际输出1个、2个、3个、……脉冲时,反馈的是100个、200个、300个、……反馈脉冲; 6、而上位机输出的一个指令脉冲,就是1个,这时如果电子齿轮比是1,反馈脉冲也应该是1个,而实际上反馈脉冲最少是100个; 7、也就是说电子齿轮比是1时,1、2、3、……100个指令脉冲,对应的反馈脉冲是100、100、100、……100个反馈脉冲; 8、这时的脉冲当量0.001,实际上是0.1,将编码器的输出脉冲倍频的方法是自欺欺人! 9、这时出现的情况就是,你通过上位机输入1、2、3、……100个指令脉冲时,伺服电机不转不启动,因为反馈脉冲是100它告诉控制中心电机已经转了100个脉冲的位移; 10、这时出现的情况就是,你通过上位机输入1、2、3、……100个指令脉冲时,伺服电机的反馈脉冲是100,控制中心控制电机反转,这时反馈脉冲又变成-100,控制中心又反转启动电机,这样电机在不断正反转振动! |
送分標準由本版的版主來裁定
我還有兩千多分 可以送 呵呵
我觉得你老是考虑细分没有意义,再细分了,机械,丝杠本身热胀冷缩的,自身重量下垂等产生的误差已经比你的大了再细分有什么意义么??
引用 笨鳥慢飛 的回复内容:預告下個懸賞200分的題目利用倍频地方法将编码器的反馈脉冲提高100倍,解析度真的提高了吗?刘志斌 发表于 2012/3/21 11:27:081、编码器与上位机的电子齿轮伺服精确控制理论,为了提高所谓的指令脉冲当量或者叫指令脉冲单位的精确度、分辨率、解析度,就在编码器上下功夫;2、编码器的刻线是有限,不可能达到131072这样的数量级;3、这个理论,就把编码器输出的脉冲用倍频的方法,把几百个或者几千个有限的编码器实际输出的脉冲任意扩大几十倍变成十几万的反馈脉冲;4、如果编码器的刻线是1000,每转一周,实际输出1000个反馈脉冲,100倍频后变成100000个反馈脉冲;5、就是说,编码器每输出1个脉冲,实际反馈的是100个脉冲,当编码器实际输出1个、2个、3个、……脉冲时,反馈的是100个、200个、300个、……反馈脉冲;6、而上位机输出的一个指令脉冲,就是1个,这时如果电子齿轮比是1,反馈脉冲也应该是1个,而实际上反馈脉冲最少是100个;7、也就是说电子齿轮比是1时,1、2、3、……100个指令脉冲,对应的反馈脉冲是100、100、100、……100个反馈脉冲;8、这时的脉冲当量0.001,实际上是0.1,将编码器的输出脉冲倍频的方法是自欺欺人! 9、这时出现的情况就是,你通过上位机输入1、2、3、……100个指令脉冲时,伺服电机不转不启动,因为反馈脉冲是100它告诉控制中心电机已经转了100个脉冲的位移; 10、这时出现的情况就是,你通过上位机输入1、2、3、……100个指令脉冲时,伺服电机的反馈脉冲是100,控制中心控制电机反转,这时反馈脉冲又变成-100,控制中心又反转启动电机,这样电机在不断正反转振动!
个人支持这个说法。
回答預告的在此沒分 那是第二個200分題目
時空 我記得你有個轉貼帖 跟這題目有關 可否請你再轉貼一次
本人所寫的都不在送分範圍





楼主最近还看过
个人主页
引用 通讯网 的回复内容:我觉得你老是考虑细分没有意义,再细分了,机械,丝杠本身热胀冷缩的,自身重量下垂等产生的误差已经比你的大了再细分有什么意义么??
引用 时空 的回复内容:引用 笨鳥慢飛 的回复内容:預告下個懸賞200分的題目利用倍频地方法将编码器的反馈脉冲提高100倍,解析度真的提高了吗?刘志斌 发表于 2012/3/21 11:27:081、编码器与上位机的电子齿轮伺服精确控制理论,为了提高所谓的指令脉冲当量或者叫指令脉冲单位的精确度、分辨率、解析度,就在编码器上下功夫;2、编码器的刻线是有限,不可能达到131072这样的数量级;3、这个理论,就把编码器输出的脉冲用倍频的方法,把几百个或者几千个有限的编码器实际输出的脉冲任意扩大几十倍变成十几万的反馈脉冲;4、如果编码器的刻线是1000,每转一周,实际输出1000个反馈脉冲,100倍频后变成100000个反馈脉冲;5、就是说,编码器每输出1个脉冲,实际反馈的是100个脉冲,当编码器实际输出1个、2个、3个、……脉冲时,反馈的是100个、200个、300个、……反馈脉冲;6、而上位机输出的一个指令脉冲,就是1个,这时如果电子齿轮比是1,反馈脉冲也应该是1个,而实际上反馈脉冲最少是100个;7、也就是说电子齿轮比是1时,1、2、3、……100个指令脉冲,对应的反馈脉冲是100、100、100、……100个反馈脉冲;8、这时的脉冲当量0.001,实际上是0.1,将编码器的输出脉冲倍频的方法是自欺欺人! 9、这时出现的情况就是,你通过上位机输入1、2、3、……100个指令脉冲时,伺服电机不转不启动,因为反馈脉冲是100它告诉控制中心电机已经转了100个脉冲的位移; 10、这时出现的情况就是,你通过上位机输入1、2、3、……100个指令脉冲时,伺服电机的反馈脉冲是100,控制中心控制电机反转,这时反馈脉冲又变成-100,控制中心又反转启动电机,这样电机在不断正反转振动!个人支持这个说法。
1、有人用过单、双臂电桥、示波器等设备吧;
2、有一个粗调按钮,细调按钮;
3、当你用粗调按钮调时,精度可以达到1Ω、1v、1mA、1s、……,再继续调试时,你还能调出0.1Ω、0.1v、0.1mA、0.1s、……吗?
4、如果你还要用粗调按钮调时,结果只能是比1Ω、1v、1mA、1s、……大,或者小;
5、特别是调检流计指针时(电桥),不是正的最大,就是负的最大,你要想使指针指向中间零,用粗调是办不到的;
6、这时候你必须用细调按钮,配合倍率不断地使指针逼近零;
引用 时空 的回复内容:引用 笨鳥慢飛 的回复内容:預告下個懸賞200分的題目利用倍频地方法将编码器的反馈脉冲提高100倍,解析度真的提高了吗?刘志斌 发表于 2012/3/21 11:27:081、编码器与上位机的电子齿轮伺服精确控制理论,为了提高所谓的指令脉冲当量或者叫指令脉冲单位的精确度、分辨率、解析度,就在编码器上下功夫;2、编码器的刻线是有限,不可能达到131072这样的数量级;3、这个理论,就把编码器输出的脉冲用倍频的方法,把几百个或者几千个有限的编码器实际输出的脉冲任意扩大几十倍变成十几万的反馈脉冲;4、如果编码器的刻线是1000,每转一周,实际输出1000个反馈脉冲,100倍频后变成100000个反馈脉冲;5、就是说,编码器每输出1个脉冲,实际反馈的是100个脉冲,当编码器实际输出1个、2个、3个、……脉冲时,反馈的是100个、200个、300个、……反馈脉冲;6、而上位机输出的一个指令脉冲,就是1个,这时如果电子齿轮比是1,反馈脉冲也应该是1个,而实际上反馈脉冲最少是100个;7、也就是说电子齿轮比是1时,1、2、3、……100个指令脉冲,对应的反馈脉冲是100、100、100、……100个反馈脉冲;8、这时的脉冲当量0.001,实际上是0.1,将编码器的输出脉冲倍频的方法是自欺欺人! 9、这时出现的情况就是,你通过上位机输入1、2、3、……100个指令脉冲时,伺服电机不转不启动,因为反馈脉冲是100它告诉控制中心电机已经转了100个脉冲的位移; 10、这时出现的情况就是,你通过上位机输入1、2、3、……100个指令脉冲时,伺服电机的反馈脉冲是100,控制中心控制电机反转,这时反馈脉冲又变成-100,控制中心又反转启动电机,这样电机在不断正反转振动!个人支持这个说法。
7、那么在一个普通电机上安装编码器后,你用手动电机转子是,你是可以看到编码器的输出脉冲数,但是你要转子调到给定的1/1000周的位置上,是不可能的;
8、你怎么调,不是比1/1000周大很多,就是小很多;
9、如果你要转子停在0位上,你会看到编码器数的脉冲会几十、几百的摆动,怎么也不会停在0位置上;
10、就是说,你仅仅能看到、能检测到转过多少度多少脉冲,但是你无法使转子精确地刚好停在0位置上;
11、你调的时候,你看到0啦,可是你还没用松手,就跑偏了!
1。伺服驱动控制就是一种随动控制,其控制原理是 :驱动器将“指令脉冲数减去反馈脉冲数”的结果来确定是否给电机提供驱动电流。如果减法结果为0则停止,如果大于0则电机继续前进。
2。现在讨论比较器中的减法,减数不变的情况下的“编码器反馈脉冲数”
1)如果不细分后的信号(如1)。如果是经过细分后的信号则是1、2、3......进行变化
2)编码器 经过细分(如10倍)时,反馈信号脉冲数则是以1*10 、 2*10、3*10......的数目变化。如果此时指令脉冲是5、15、25或者155则,电机始终找不到此位置了而前后摆动。
3)按此理细分不仅起不到提高控制的作用,反而降低控制精度了。
3.提问:上面是在指令脉冲数不变的情况下进行细分后的结果。但如果指令脉冲数也能进行相应的“细分”设置是否就能消除上述情况中出现的问题,同时确实发挥编码器细分的功能呢?由此是否可以初步判定对指令脉冲数的“细分”就是通过设置电子齿轮比完成的呢?
1、所以给普通电机安装编码器,只解决了检测反馈的问题,电机本身的启动、停止是否能按要求的精度准确的起始位置或终止位置的控制没有变;
2、所以安装编码器只解决了电机转动位移的精确检测,没有解决电机本身位置的精确控制的问题;
3、就是说,你能知道转子转过的角度是360/1000,你还要解决让它真正转过360/1000度的问题,否则它转过的读数总是比360/1000大很多,或者小很多;
麻烦问一下:
上面几位知道伺服是什么东西吗?
知道伺服的控制原理吗?
老劉 歡迎你的加入 最好把你原創及引用 抄襲 剽取 全放進來 都放在同一個樓層 較不易被誤解( 呵呵 我經常被你搞得眼花撩亂) 當然你想多賺點積分 也不能勉強
建議支持老劉的朋友 就寫個支持劉老師的說法 不要再轉貼(除非 能提出相關證據 或說明 本人嚴重支持)
7、那么在一个普通电机上安装编码器后,你用手动电机转子是,你是可以看到编码器的输出脉冲数,但是你要转子调到给定的1/1000周的位置上,是不可能的;
8、你怎么调,不是比1/1000周大很多,就是小很多;
老刘你在胡说八道!!
想调到这个位置很容易, 不用编码器也能调到
引用 luedong 的回复内容:
7、那么在一个普通电机上安装编码器后,你用手动电机转子是,你是可以看到编码器的输出脉冲数,但是你要转子调到给定的1/1000周的位置上,是不可能的;8、你怎么调,不是比1/1000周大很多,就是小很多;
老刘你在胡说八道!!想调到这个位置很容易, 不用编码器也能调到
1、不用编码器,你调到哪儿了不知道;
2、有了编码器,你就能知道调到哪儿了;
3、可是你无法调到你想要的精确位置,你的编码器不断告诉你不是过了、就是欠了;
引用 刘志斌 的回复内容:引用 luedong 的回复内容:7、那么在一个普通电机上安装编码器后,你用手动电机转子是,你是可以看到编码器的输出脉冲数,但是你要转子调到给定的1/1000周的位置上,是不可能的;8、你怎么调,不是比1/1000周大很多,就是小很多; 老刘你在胡说八道!!想调到这个位置很容易, 不用编码器也能调到 1、不用编码器,你调到哪儿了不知道;2、有了编码器,你就能知道调到哪儿了;3、可是你无法调到你想要的精确位置,你的编码器不断告诉你不是过了、就是欠了;
你不懂就别瞎扯!
说点你懂的:
两块磁铁的放在那边, 一定是NS相吸, 这个你不反对吧?
电机转到1/1000周, 假设是从转子永磁体的N极那边转。
这样你只要在定子三项绕组中通上直流电, 使电机产生的静止磁场的S极在你需要转到的1/1000周的地方就可以了。
只要这个电流足够大, 产生的磁场吸力就会使 转子永磁体的N极固定在1/1000周的地方!
这个在伺服中的术语叫找初始相位, 用来校正编码器的零点。
在定子三项绕组上面通过功率模块可以加上的电压所产生的直流电所形成的合成磁场可以在0到360度内的任意角度上。
你只要计算一下1/1000周对应的电角度是多少, 产生在这个角度上的磁场, 即NS,拖动转子固定在这个位置上!
所以不用编码器也能调到!
有编码器时,用上面的方法,你只是通过编码器看看有没有到而已!
这种方法只用于初始定位, 实际的伺服位置控制不是这样的。
老刘这样的搓人,跟他说了他也不懂!
1、伺服的精确控制必须解决的几个环节:
1)要解决检测反馈的精确度,例如用编码器;
2)电机的启动通电、停止断电的时间要精确控制;
3)电机在断电后、或通电后,转子启动、或停止的位置是否在给定的位置上;
4)工件是否在给定的位置精确启动、或停止;
2、所以给普通电机,安装编码器后,并没有提高开关、电机、工件的精确控制;
3、所以靠安装编码器、靠分倍频、提高所谓的反馈脉冲的分辩率或者叫什么解析度,靠提高上位机发出指令脉冲的分倍频,用反馈脉冲与指令脉冲的比较信号去控制电机的启动、加速、匀速、减速、制动停车,无法实现伺服对工件真正意义上的精确控制;
4、如果有人不断宣扬他的编码器是多少位的,所以他的控制精度达到了多少,那就是在蒙你、骗你!
你们讨论的问题太小儿科了, 我不参与了!
你们继续讨论!
TO:luedong
劉大師講的是普通電機 非伺服電機
猜猜看 "控制中心"又反转启动电机 這控制中心又是甚麼東西 這個都搞不清楚 那控制的原理 又怎能明白 那 "JOG" ???? 還有"MPG"
他那雙老手可能抖一下 就超過1/1000週
引用 笨鳥慢飛 的回复内容: TO:luedong 劉大師講的是普通電機 非伺服電機 猜猜看 "控制中心"又反转启动电机 這控制中心又是甚麼東西 這個都搞不清楚 那控制的原理 又怎能明白 那 "JOG" ???? 還有"MPG"他那雙老手可能抖一下 就超過1/1000週
管她什么普通电机, 只要是PMSM永磁电机就行!
他活在文革上山下乡的时代, 知识水平有限, 就克拉玛依技校的水平, 在教师行业里技校老师似乎评不上职称吧, 什么讲师、副教授、教授的统统不是!!!
全国高校那么多教授、副教授, 都没有他操心多!
有必要做那么细小的分吗,实际运行的丝杆或是滑动你能定位到0.001 MM 吗???没意思的说
前段)最重要的功能是,在指令脉冲上准确启动或停车,例如指令脉冲是10001时,能在基点0精确启动,能在第10001个指令脉冲是精确停车!
後段) 如果有人不断宣扬他的编码器是多少位的,所以他的控制精度达到了多少,那就是在蒙你、骗你!
這兩段話都是你講的 是前段矇後段 還是後段騙前段
最重要的功能是,在指令脉冲上准确启动或停车,例如指令脉冲是10001时,能在基点0精确启动,能在第10001个指令脉冲是精确停车!
這句話是有問題 電控本身不該講精度 若真的要講精度 那應該說 正負一個脈衝的震盪(若你做過視覺控制 在螢幕上可看到機構來回震盪)
----------------------------------------
管是抄还是转,只要能学习知识 難怪你不知天外有天 人外有人 自己沒能力 不代表別人跟你一樣
引用 笨鳥慢飛 的回复内容:前段)最重要的功能是,在指令脉冲上准确启动或停车,例如指令脉冲是10001时,能在基点0精确启动,能在第10001个指令脉冲是精确停车!後段) 如果有人不断宣扬他的编码器是多少位的,所以他的控制精度达到了多少,那就是在蒙你、骗你!這兩段話都是你講的 是前段矇後段 還是後段騙前段
前段)来至下文:
5、伺服控制系统对伺服电机的要求:
1)一般功能:启动、停车制动、正反转;
2)调速的功能,速度闭环;
3)转矩控制功能,电流闭环;
4)最重要的功能是,在指令脉冲上准确启动或停车,例如指令脉冲是10001时,能在基点0精确启动,能在第10001个指令脉冲是精确停车!
後段) 来至下文:
1、伺服的精确控制必须解决的几个环节:
1)要解决检测反馈的精确度,例如用编码器;
2)电机的启动通电、停止断电的时间要精确控制;
3)电机在断电后、或通电后,转子启动、或停止的位置是否在给定的位置上;
4)工件是否在给定的位置精确启动、或停止;
2、所以给普通电机,安装编码器后,并没有提高开关、电机、工件的精确控制;
3、所以靠安装编码器、靠分倍频、提高所谓的反馈脉冲的分辩率或者叫什么解析度,靠提高上位机发出指令脉冲的分倍频,用反馈脉冲与指令脉冲的比较信号去控制电机的启动、加速、匀速、减速、制动停车,无法实现伺服对工件真正意义上的精确控制;
4、如果有人不断宣扬他的编码器是多少位的,所以他的控制精度达到了多少,那就是在蒙你、骗你!
引用 luedong 的回复内容:(20楼)
…… 这样你只要在定子三项绕组中通上直流电, 使电机产生的静止磁场的S极在你需要转到的1/1000周的地方就可以了。……
1、luedong说的这句话,我非常爱听;
2、这句话表示你在用编码器的反馈脉冲、上位机的指令脉冲比较输出控制电机停车或者启动命令时,要明确知道伺服电机的电源脉冲电流流入哪个绕组或者线圈;
3、这就是我说的“伺服控制系统对伺服电机的要求:4)最重要的功能是,在指令脉冲上准确启动或停车,例如指令脉冲是10001时,能在基点0精确启动,能在第10001个指令脉冲是精确停车!”
4、没有这一点,任凭你在编码器上下功夫都是白搭,都是骗人;
5、如何做到这一点,如何知道在什么位置给那个绕组输入脉冲电流,这就是我说的:
《怎么样才能实现伺服的精确控制》
http://bbs.gongkong.com/Details/201203/2012031913415200001-1.shtml
6、luedong的这句话,宣告了,只用编码器的反馈脉冲和上位机的指令脉冲比较产生的控制电机运行的信号,完成控制电机的启动、加速、匀速、减速、停车,就能实现伺服高精确控制的理论,是骗人的,是谎言!
7、用编码器的反馈脉冲和上位机的指令脉冲比较产生的控制电机运行的信号,必须要明确控制电机输入的电流脉冲的相位,不仅仅是启动、加速、匀速、减速、制动停车的一般自动控制环节;
8、如果要控制伺服电机的输入电流脉冲的相位,编码器器的刻线,就很有讲究,刻线和电机绕组间的位置关系很重要,不是简单分陪频的问题了:
9、请大家去看看我设计的编码器是个什么样:
《电机旋转一周的脉冲数到底怎样去计算?》中2楼~24楼的回帖!
http://bbs.gongkong.com/Details/201203/2012031219583900002-1.shtml
引用 luedong 的回复内容:所以不用编码器也能调到! 有编码器时,用上面的方法,你只是通过编码器看看有没有到而已! 这种方法只用于初始定位, 实际的伺服位置控制不是这样的。 老刘这样的搓人,跟他说了他也不懂!
请你去看看,看看谁不懂?
关于编码器: 1、编码器的刻线有10000的; 2、这是一个错误的无知的追求,你花高价买的这个10000刻线的编码器,可能不会帮助你,反而会给你带来很多麻烦; 3、编码器的类别要与伺服电机的属性一致: 1)直流伺服电机的编码器,刻线要与直流电机的槽数相配合; 2)交流伺服电机的编码器,刻线要与交流电机的极数、相数相配合; 3)目的是刻线是电机步进的整数倍,这样编码的检测信号就会是整数,不会有小数,不会有偏差; 4、所谓增量式和绝对式编码器,差别就是前者只有秒针,没有分针、时针的计时器一样; 5、编码器的作用,主要是能检测伺服实际运行的步数、转数、……,并能输出实际运行所需要的信息,如起点位置、转向、……。 6、系统的目的是被驱动的工件的位置、位移、速度等的精确控制,这个控制的精确度恰恰与编码器的刻线多少无关,只要编码器能精确检测出步数即可; 1、步进电机控制,只能整步整步的转动,如果细分就失去步进的意义; 2、但是工件的位移,可以通过传动比细分,通过传动比提高电机的转速,减低工件的位移速度; 3、例如4极、3相步进电机,每转一周有12步,转100周共1200步,工件走1200mm,那么每步工件移动1mm; 4、例如4极、3相步进电机,每转一周有12步,转100周共1200步,工件走120mm,那么每步工件移动0.1mm; 5、例如4极、3相步进电机,每转一周有12步,转100周共1200步,工件走12mm,那么每步工件移动0.01mm; 6、因为步进电机走一整步是准确的,走半步就不准确了; 7、工件的位移分辨率(0.01mm),决定伺服的步数(1200=极数×相数×伺服转数)与工件的位移量(12mm=丝杠的螺距×丝杠的转数): 1)位移分辨率=位移/步数 2)减速比=伺服的转数/丝杠的转数=伺服的转速/丝杠的转速 3)位移=丝杠的螺距×丝杠的转数 4)步数=极数×相数×伺服转数 5)丝杠的转数=伺服转数/减速比=伺服转数×丝杠的转速/伺服的转速 6)位移分辨率=位移/步数=丝杠的螺距×丝杠的转数/极数×相数×伺服转数 =丝杠的螺距×伺服转数/(减速比×极数×相数×伺服转数) =丝杠的螺距/减速比×极数×相数 |
《电机旋转一周的脉冲数到底怎样去计算?》中2楼~24楼的回帖!(注意看 這裡有很多笑話)
http://bbs.gongkong.com/Details/201203/2012031219583900002-1.shtml
1 先把精度跟解析度搞清楚
2 電子細分也可做在編碼器上 百萬脈衝都有 另外 把編碼器的脈衝訊號 當成電源脈衝 也只有你想的出來 所以也就控制電機運轉的笑話
3 電子齒輪這參數先搞清楚放置在哪裡 不要張冠李戴
4 當你真的搞清脈衝當量的定義 0.001 就是0.001 而且脈衝當量不是精度
5 你知道邊碼器安裝在哪裡嗎 不知道就花個錢買個伺服電機 拆拆看 不要丟人現眼 都搞不清楚在此 編碼器與電機是同步
海德漢若看到你這結論 鐵定 把他們笑死
又把馮京當馬涼 我們談的是伺服 怎又變步進 怎麼電機又搞不清楚
編碼器在伺服電機辦演兩個角色 一個做為定位用 另一個呢 這個就是你不懂的地方 才會無知寫 高解析度編碼器其功能不再定位精度 而是追求運動過程的平順度 是錯誤的說法
引用 笨鳥慢飛 的回复内容
……把編碼器的脈衝訊號 當成電源脈衝 ……
“把編碼器的脈衝訊號 當成電源脈衝”,谁说的?请你把相关发言贴出来!?
引用 笨鳥慢飛 的回复
…… 編碼器與電機是同步……
谁说编码器与电机不同步?贴出来!
引用 笨鳥慢飛 的回复内容:“把編碼器的脈衝訊號 當成電源脈衝”,谁说的?请你把相关发言贴出来!?……
1、请问笨鸟,你贴了那么多,那一句是“把編碼器的脈衝訊號 當成電源脈衝”?
2、难道这样一句话,需要贴那么多吗?
那是你貼的 我僅是轉貼
一個脈衝訊號 你可以從2樓貼到24樓 我也是看了半天 才看出來 內容是你貼的 怎還問我 可惜我有註解的貼帖 可能被波恩刪除 你只好慢慢看 這個註解你也沒做過辨解
3、看来你的理解出问题了,我说的是编码器检测转子的位置,输出的脉冲数能使电机的步进脉冲之间的关系是整数关系:
1)例如电机转一周,需要12个电流脉冲,一个电流脉冲转子转过的角度是1/12周;
2)那么编码器刻线数是多少时,保证转子转过1/12周,编码器输出的检测反馈脉冲恰好是整数;
3)如果刻线是12、24、36、……的整数倍,那么转子转过1/12周,编码器输出的反馈脉冲数就恰好是1、2、3、…整数个脉冲;
4)如果刻线是13、25、37、……,那么转子转过1/12周,编码器输出的脉冲数就是13/12、25/12、37/12、…非整数个脉冲;
4、这是我关于编码器刻线多少提出的一个新问题,你的理解有点错觉!
5、本来这些观点对你是很有用的,可是你反过来骂人,真不应该!
引用 luedong 的回复内容:(20楼)
…… 在定子三项绕组上面通过功率模块可以加上的电压所产生的直流电所形成的合成磁场可以在0到360度内的任意角度上。 你只要计算一下1/1000周对应的电角度是多少, 产生在这个角度上的磁场, 即NS,拖动转子固定在这个位置上!
1、三相对称交流绕组,通入三相对称正弦交流电,所形成的合成磁场是在0到360度内的任意角度上。
2、可是你通过功率模块加上去的电流脉冲已经不是正弦交流电,对应这一个电流脉冲的磁极位置是确定的,到下一个电流脉冲来到时,磁场就会跟随线圈移动到一个新的位置上,等于磁极转过了一个角度;
3、这样你就不可能形成的“磁场可以在0到360度内的任意角度上”;
4、也就是说伺服电机注定是脉冲式步进的工作方式;
5、所以luedong 的“在定子三项绕组上面通过功率模块可以加上的电压所产生的直流电所形成的合成磁场可以在0到360度内的任意角度上。”的观点是错误的!
引用 luedong 的回复内容:(21楼)
所以不用编码器也能调到! 有编码器时,用上面的方法,你只是通过编码器看看有没有到而已! 这种方法只用于初始定位, 实际的伺服位置控制不是这样的。 老刘这样的搓人,跟他说了他也不懂!
1、luedong 说“不用编码器也能调到”,这句话又错了;
2、如果你不知道转子的位置,你就不知道给那个线圈绕组通入电流脉冲,让转子转到你需要的位置上;
3、转子的磁极不是一个N(S)极,有很多,定子的磁极他不知道他该吸引那个N(S)极,才能使转子转到指定的位置上;
4、所以编码器的反馈检测脉冲,是伺服控制的必要条件,但不是充分条件;
总数:60 | 当前第1/2页12
引用 luedong 的回复内容:你们讨论的问题太小儿科了, 我不参与了!你们继续讨论!
luedong 小瞧论坛的议题了,自己一样犯了小儿科的错误!
若我理解出問題 可能是你寫作技巧有問題
当编码器输出反馈脉冲1、2、3、……100时,实际转子就没有转动!這是事實不是理解錯誤
目前海德漢我知道的編碼器其最高刻線為36000 1Vpp 還是用在航天 當然是管制品 你有錢還買不到
(海德漢若看到你這結論 鐵定 把他們笑死)
引用 笨鳥慢飛 的回复内容:
若我理解出問題 可能是你寫作技巧有問題当编码器输出反馈脉冲1、2、3、……100时,实际转子就没有转动!這是事實不是理解錯誤目前海德漢我知道的編碼器其最高刻線為36000 1Vpp 還是用在航天 當然是管制品 你有錢還買不到(海德漢若看到你這結論 鐵定 把他們笑死)
1、辩论了这么多天,除了骂人,谁也没有看到你有一篇完整的论述,来表达自己的看法;
2、当你用编码器的反馈脉冲判断转子是否转动时,由于是100倍频的脉冲,“当编码器输出反馈脉冲1、2、3、……100时,实际转子就没有转动!”;
3、就是说转子转动时,实际编码器的反馈脉冲是100、200、300、……变化的;
4、编码器输出的反馈脉冲1、2、3、……100时,对应的是100;101、102、103、……200时,对应的是200;……
5、如果电机在101个脉冲时停了,这时你的编码器还在输出102、103、……的输出脉冲,而电机早已经停了;
老劉若你還沒癡呆 應該記得我寫過 "系統機電整合經驗談" 你寫的這些在上面多數都有提到 我也僅敢寫經驗談 哪像你動不動 就理論 學說 騙術 呵呵 這篇文章我在去年就把他刪除 就怕你這種人看不懂 又亂引用
這些在市面上已經很成熟的應用 還需要什麼論述 少往臉上貼金
当编码器输出反馈脉冲1、2、3、……100时,实际转子就没有转动!”;
3、就是说转子转动时,实际编码器的反馈脉冲是100、200、300、……变化的; 這兩句話的意思是相同 哈哈哈
6、如果用圆光栅,一条刻线对应100个“莫尔条纹”的情况,就是和千分尺、卡尺的道理一样;
7、光栅的原理是,把刻线间的间隔用“莫尔条纹”放大的,例如当“莫尔条纹”是100时,就相当把刻线间的间隔放大并分成100分;
8、这个与分倍频的概念是两码事!
如果电机在101个脉冲时停了,这时你的编码器还在输出102、103、……的输出脉冲,而电机早已经停了;
編碼器跟電機是同步 電機停止 編碼器還會出現脈衝 你真能忽悠
引用 笨鳥慢飛 的回复内容:……当编码器输出反馈脉冲1、2、3、……100时,实际转子就没有转动!”;3、就是说转子转动时,实际编码器的反馈脉冲是100、200、300、……变化的; 這兩句話的意思是相同 哈哈哈
1、既然知道是重复,就是说你不傻,怎么能理解出“把編碼器的脈衝訊號 當成電源脈衝”的?
2、以后说话一定要说清楚,是“我说的”还是“你理解的”!
引用 笨鳥慢飛 的回复内容:如果电机在101个脉冲时停了,这时你的编码器还在输出102、103、……的输出脉冲,而电机早已经停了;編碼器跟電機是同步 電機停止 編碼器還會出現脈衝 你真能忽悠
1、如果你是100倍频,编码器输出的脉冲只能是100、200、300、……;
2、如果你在100、200间插入101、102、……,这时候这些插入的数字脉冲就与转子转动无关,是计算器的行为;
引用 笨鳥慢飛 的回复内容:
老劉若你還沒癡呆 應該記得我寫過 "系統機電整合經驗談" 你寫的這些在上面多數都有提到 我也僅敢寫經驗談 哪像你動不動 就理論 學說 騙術 呵呵 這篇文章我在去年就把他刪除 ……
1、我这一段时间,不相信发言的是笨鸟,觉得你把密码给别人了,完全是另外一个人;
2、"系統機電整合經驗談”你删了,你怕别人学你的经验,怕徒弟砸了你的饭碗;
3、我不怕,相反我怕的是我想的大家不知道,所以就很用功的在这里劳作;
4、我喜欢看到我的观点出现在同行的贴子里、论文里,我的观点在发挥作用,如果不是这样,你想想,我还会在这里和你、luedong辛苦吗?
引用 笨鳥慢飛 的回复内容:……倍頻(電子細分)……
1、分频、倍频有确定的物理定义;
2、在2进制计数器中,设输入记数脉冲频率是f,则在2位、3位、4位、……输出的脉冲频率为f/2、f/4、f/8、……;
3、这时候我们定义f/2、f/4、f/8、……是f的2分频、4分频、8分频……;
4、这时候我们定义f是 f/2、f/4、f/8、……的2倍频、4倍频、8倍频……;
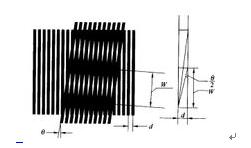
5、光栅编码器,在两光栅栅线夹角较小的情况下,莫尔条纹宽度W和光栅栅距ω、栅线角θ之间有下列关系。式中,θ的单位为rad,W的单位为mm。由于倾角很小,sinθ很小,则
W=ω /θ
若ω =0.01mm,θ=0.01rad,则上式可得W=1,即光栅放大了100倍。
 莫尔条纹计算
莫尔条纹计算
6、你的电子细分概念是什么?
总数:66 | 当前第2/2页1 2
引用 笨鳥慢飛 的回复内容:
…去請教 海德漢 或者 網上有個@Q的行家 他系出海德漢 讓他告訴你甚麼是電子細分(倍頻)
1、我在这里讨论,用的是法定概念;
2、至于别人说的,那是另一回事,你也不用倒来倒去,捉迷藏的事你自己去玩吧!


- 什么叫过电流脱扣器?
 [2311]
[2311] - 接地线使用黄绿双色线好还是...[2281]
- 电缆线路日常维护三点要素[2079]
- 请教高手:三相电机如何配漏电...[2689]
- 开关电源工作原理及开关电源...[1828]
- (已结贴)电源电器擂台第110期...[1379]
- (已结贴)电源电气擂台第107期...[1187]
- 三相200V电机可以采用星三角...[1713]
- 说说锂电池那些事2[1920]
- 怎样用单相电度表测三相电度[4708]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
