LabVIEW PID高级整定技术与工程应用 点击:113 | 回复:0

PID 是工业控制中占比超 90% 的经典算法,适用于线性时不变系统,但面对非线性、扰动、大滞后等场景时性能受限。本文基于 LabVIEW 工具包,系统讲解增益调度、抗积分饱和、串级 PID、前馈控制等高级整定方法,帮助工程师在复杂非线性、多变量、大扰动系统中实现稳定、快速、精准的控制。
一、核心知识点
1. 经典 PID 控制
原理:通过反馈将测量值与设定值比较,按误差计算 P/I/D 输出,实现闭环调节。
局限:假设系统线性、时不变,对非线性、扰动、时延场景适应性差。
2. 高级 PID 整定技术
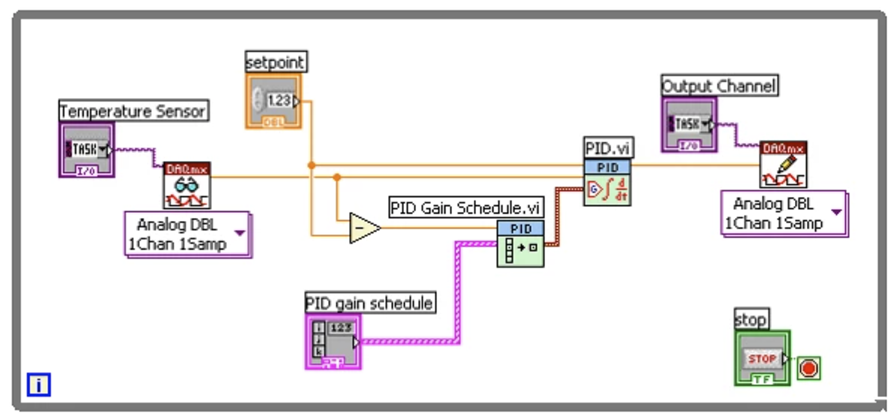
(1)增益调度(Gain Scheduling)
原理:根据系统状态(温度区间、负载、误差大小)分段切换最优 P/I/D 参数。
特点:将非线性系统近似为多段线性模型,每段独立整定。
使用场合:温箱升降温、电机高低速、大行程运动控制等工况变化大的系统。
注意事项:
分段边界要平滑,避免参数突变导致抖动。
需提前测试各段最优参数。
LabVIEW 中用PID Gain Schedule.vi实现。
(2)抗积分饱和(Avoiding Integral Wind-up)
原理:误差累积过大导致超调与振荡,通过阈值复位积分项抑制饱和。
特点:减小超调,提升稳态精度,保护设备。
使用场合:阀门限位、加热制冷、伺服定位等易超调场景。
注意事项:
设定合理误差阈值,接近设定值时复位积分。
兼顾响应速度与稳定性。
(3)非单入单出系统(Non-SISO)
实现方式:
单输入多输出(SIMO):一路 PID 输出控制加热 / 制冷双执行器。
多 PID 并行:多回路独立调节。
使用场合:温湿度耦合控制、多执行器协同系统。
(4)串级 PID(Cascaded PID)
原理:主 PID 输出作为副 PID 设定值,双环协同抑制扰动、加快响应。
典型结构:位置环 + 速度环、温度环 + 功率环。
特点:抗扰动强、滞后抑制好、输出平滑。
使用场合:运动控制、高精度温控、大惯性 / 大滞后系统。
(5)前馈 PID(Feed-forward Control)
原理:直接测量扰动并提前补偿,不等待误差产生再调节。
特点:扰动抑制极快,大幅降低动态误差。
使用场合:通风扰动温控、负载突变电机控制、流量前馈补偿。
二、使用场合总览
表格
技术 | 适用场景 |
增益调度 | 工况变化大、非线性明显系统 |
抗积分饱和 | 易超调、有执行器限幅系统 |
非 SISO PID | 多执行器、多变量耦合系统 |
串级 PID | 大滞后、强扰动、高精度控制 |
前馈 PID | 可测量扰动、需快速抑制的系统 |
三、特点对比
表格
方案 | 响应速度 | 抗扰动 | 超调 | 复杂度 |
经典 PID | 中 | 弱 | 中 | 低 |
增益调度 | 中 | 中 | 低 | 中 |
抗积分饱和 | 中 | 中 | 低 | 低 |
串级 PID | 快 | 强 | 低 | 高 |
前馈 PID | 极快 | 极强 | 低 | 中 |
四、使用注意事项
先保证基础 PID 稳定,再叠加高级功能。
串级 PID 先调副环,再调主环。
前馈需准确测量扰动,避免补偿过量。
增益调度分段不宜过多,保证切换平滑。
优先在 LabVIEW 中使用官方 PID 工具包 VI,稳定性更高。
五、实际应用案例
案例:高精度温度箱控制
需求:升温快、超调 < 1℃、稳态误差 ±0.1℃,抗开门扰动。
方案:
增益调度:低温段用高 P 快速升温,近设定值切低 P 高 I。
抗积分饱和:误差 < 0.25℃复位积分,抑制超调。
串级 PID:主环温控,副环功率控制,抑制电网波动。
前馈:开门扰动检测,立即补偿加热功率。
效果:升温快速无超调,稳态精度高,开门后快速拉回设定值。
六、总结
PID 高级整定通过增益调度、抗饱和、串级、前馈等技术,突破经典 PID 局限,适配非线性、多变量、大扰动、大滞后工业场景。结合 LabVIEW 工具包可快速实现,显著提升控制精度、响应速度与系统稳定性。





楼主最近还看过

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
