【正运动技术】UVW机器视觉与运动控制实现过程 点击:197 | 回复:0

发表于:2026-01-15 10:04:41
楼主
机器视觉实现过程
视觉系统支持2台或4台面阵相机灵活配置。只需一次“拍照→框选Mark点→确认目标区域”,即可自动生成标定系数,全程无需人工计算,现场部署时间缩短70%以上。
随后,软件在毫秒级内输出目标位姿与实际位姿的偏差矩阵(ΔU、ΔV、ΔW、Δθ),并驱动UVW平台完成亚微米级闭环纠偏,实现“即拍即对”的全自动视觉对位。
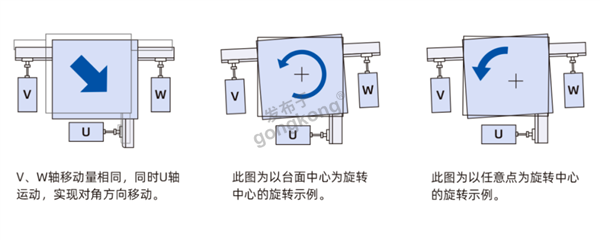
运动控制实现过程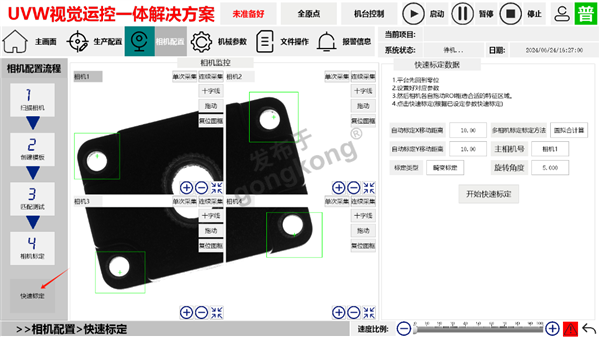
配置流程三步到位:
(1)选型:根据机械构型(FRAME33/34/37)调用对应轴列表,录入关节轴与虚拟轴参数;FRAME33须额外校验VW水平度。
(2)零点:平台任意点可设为零,只需保证结构参数与实物一致,系统自动建立绝对坐标系。
(3)建模:执行一条“建立正逆解”指令,瞬间算出UVW三轴原始坐标与2/4面阵相机图像坐标之间的映射矩阵。
运行时,视觉给出的ΔU、ΔV、ΔW、Δθ被实时转换成三轴线性伸缩量,平台一次性完成“旋转 + 平移”复合补偿,全程<1ms,实现高速、高精的视觉对位闭环。
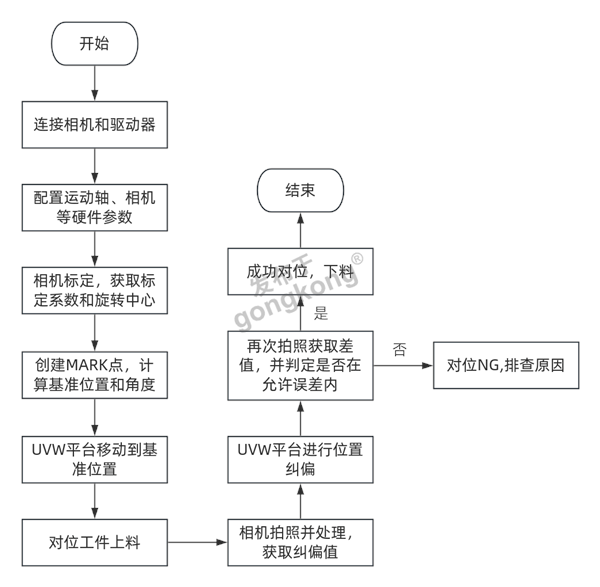
UVW视觉对位工艺流程





楼主最近还看过
热门招聘
相关主题

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
