【正运动技术】控制器的运动前瞻功能详解 点击:327 | 回复:1

1.CornerMode功能前瞻设置说明
第一,它可对指令进行整体规划,即对各段速度进行整体规划,再配合指令段内的加减速控制,可以使机床保持高速运行提高效率,使负载运动更加流畅,告别停停走走,系统通过Merge速度融合功能实现。 第二,它可保证在高速运行的基础上为了限制机械冲击和过切等,进行减速识别,通过提前识别轨迹变化,从而按照安全的减速度提前减速,系统通过减速/停止融合功能、抑制冲击功能实现。 综上所述,速度前瞻功能既可提升整机效率,也可减少冲击增加柔性,降低零部件磨损,增加设备使用寿命。
(1)拐角减速
拐角减速功能解决的问题是:当指令间夹角过大时,如果仍以较大速度运行,会在夹角处产生较大的机械冲击,轨迹偏离。
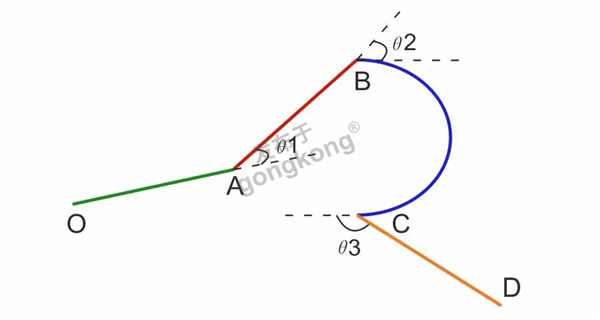
控制器会对指令间轨迹变化的夹角进行提前识别,比较其与减速/停止角的大小关系,提前决定是否进行减速,保证在指令连接处平稳过渡。
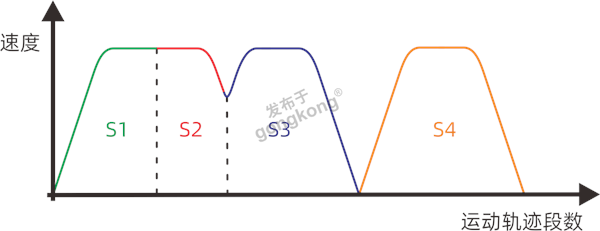
如图,OA过渡AB段位置时角度小于减速角度则,S1-S2段不进行减速,AB过渡BC段时角度大于减速角度则进行减速处理过渡过程如S2-S3段,BC过渡CD段角度大于停止角度速度需要降到零如S3-S4段位置处理。执行效果如下:
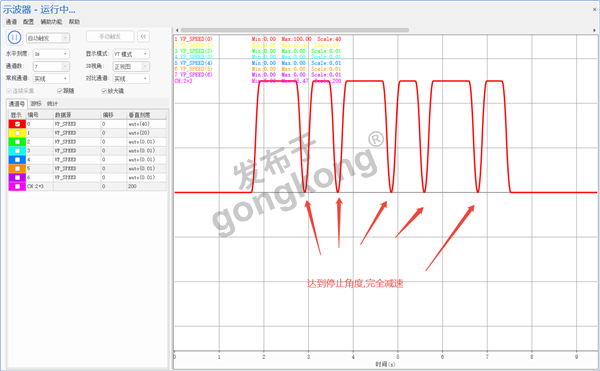
①未开启拐角减速
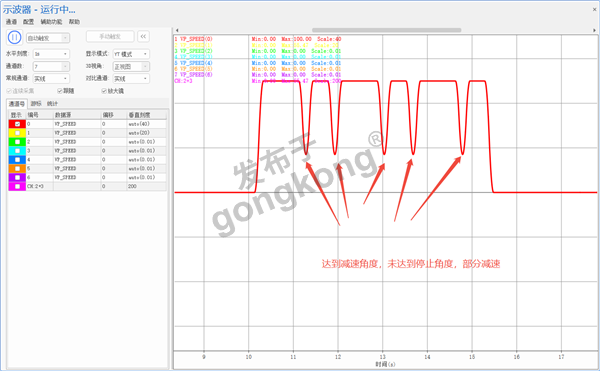
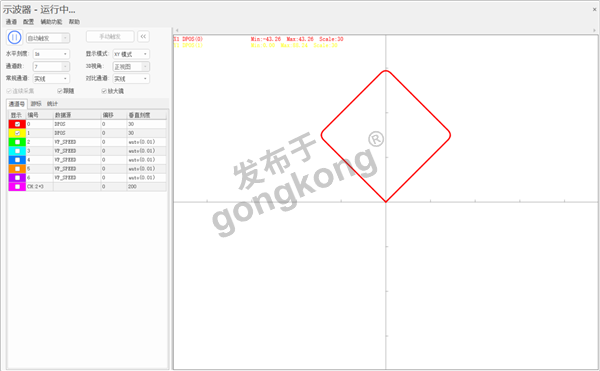
②开启拐角减速 →达到减速角度,未达到停止角度,部分减速。 →达到停止角度,完全减速。 (2)小圆限速 小圆限速功能用于处理,在运行轨迹中可能运行圆弧轨迹拟合成的小圆,由于角度偏转较大导致出现轨迹偏转,因此在这种位置需要进行速度限制的处理。开启小圆限速,小圆半径超过限速半径的时候不会对速度限制,小圆半径小于限速半径的时候则会开始对速度进行限制。 (3)自动倒角 自动倒角功能一般是用于拐角处按照一定的倒角半径进行轨迹的弧度化处理,使速度变化更平滑。如图所示: ①未开启倒角 ②开启倒角 2.适用于小线段应用的新平滑指令 针对连续小线段应用,可以开启zsmooth_mode平滑速度曲线模式,效果显著。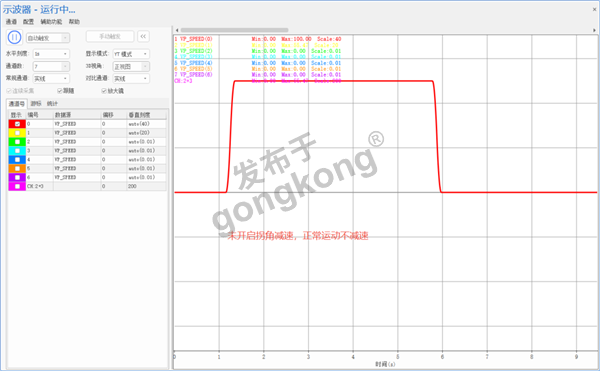






楼主最近还看过


官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
