【求助】ABB手臂怎样调点位 点击:1628 | 回复:3

 此帖发自小程序
此帖发自小程序





楼主最近还看过

发表于:2024-04-11 09:24:19
1楼
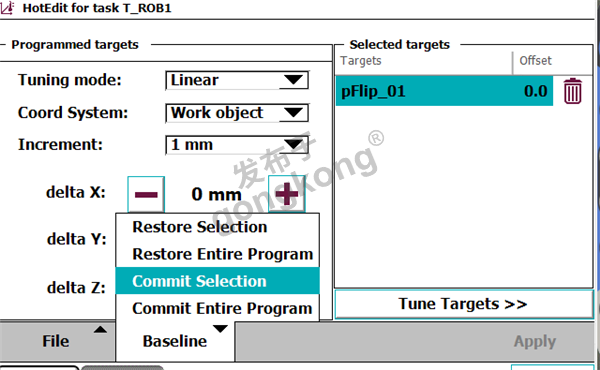
点位调整涉及对机器人示教器(Teach Pendant)的操作,以及可能修改机器人程序。以下是一个大致的操作流程,用于在原有点位基础上进行微调,并重新记忆调整后的位置:
准备工作:
确保机器人处于安全状态,避免在调整过程中发生碰撞。
检查机器人的电池和电源,确保电量充足且连接稳定。
准备好示教器,并确保其与机器人之间的通信正常。
进入示教模式:
使用示教器打开机器人控制系统,并切换到示教模式。
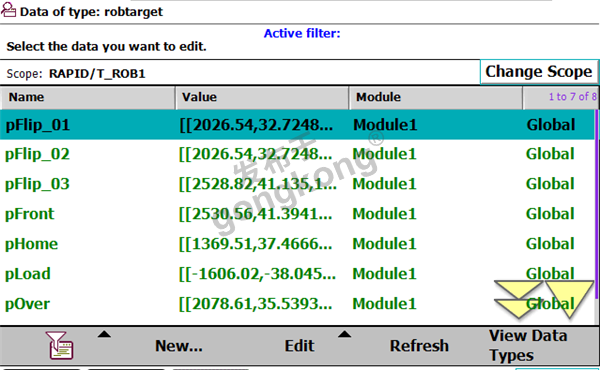
找到原始点位:
通过示教器上的移动控制杆或按钮,手动将机器人移动到原始点位。
如果机器人有自动返回原始点位的功能,可以直接使用该功能。
微调点位:
在示教模式下,使用微动控制功能(如微调按钮或控制杆)对机器人手臂进行微调。
微调时,注意观察机器人的移动,确保调整量精确且安全。
记录新点位:
在微调完成后,使用示教器上的“记录位置”或类似功能,将新的点位信息记录到机器人程序中。
根据ABB机器人的具体型号和软件版本,这一步的操作可能会有所不同。
测试新点位:
在程序中添加或修改调用新点位的指令。
运行程序,观察机器人是否能够准确到达新点位。
如果存在偏差,重复步骤3至5进行进一步的微调。
保存和备份:
完成点位调整后,记得保存机器人程序。
为了安全起见,建议备份程序到外部存储设备或云端。
退出示教模式:
当所有调整都完成后,退出示教模式,并将机器人切换到自动运行模式(如果需要)。



 工控网智造工程师好文精选
工控网智造工程师好文精选
