如何更改ABB机器人轴的软限位 点击:866 | 回复:0

发表于:2024-01-24 15:20:07
楼主
以下以1200为例:
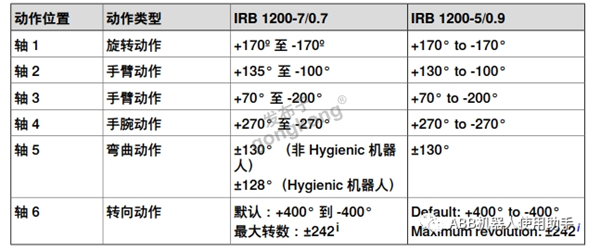
1-5轴的运动范围是一个角度区间,可以更改为更小的角度范围。
6轴默认值是+400° 到 -400°,可以设置成“无限旋转”。可以更改为+242*360° 到 -242*360°;
如何限制关节式机器人的工作区域?
通过限制各轴工作范围的方式来限制关节式机器人的工作区域。此外也可通过硬件停止的方式来限制其工作区域。
若要限制关节式机器人的机器人工作区域:
1 在主题Motion下选择类型Arm。
2 选择有待编辑的臂。
3 通过编辑参数Upper Joint Bound和Lower Joint Bound来设置该关节工作区域的自身限值(以弧度为单位)。
4 保存更改内容。






楼主最近还看过
热门招聘
相关主题

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
