手动正反转会置位方向信号影响回原点 点击:250 | 回复:1

 正在下载,请等待……
正在下载,请等待……







楼主最近还看过
发表于:2021-10-22 10:21:31
1楼
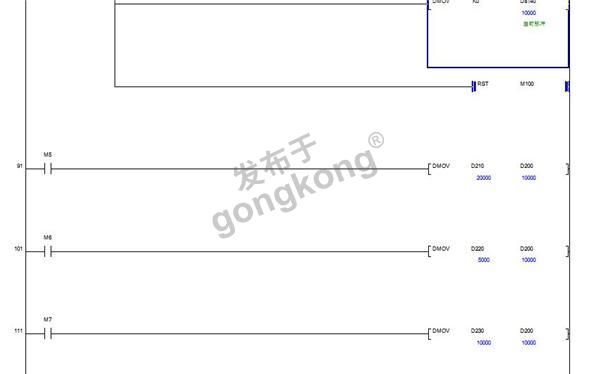
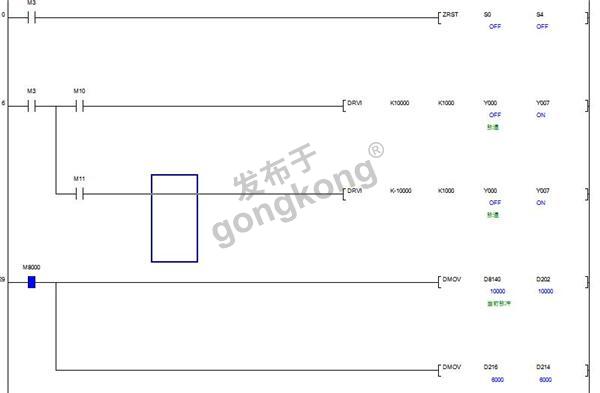
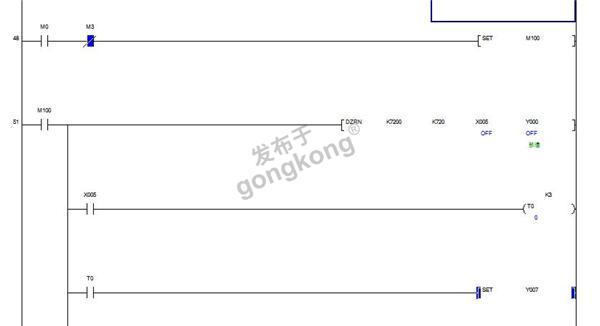
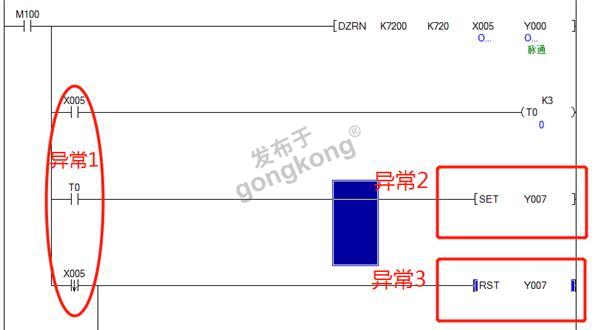
大致明白了你的问题 首先你程序本身有点小问题 你手动程序也应该是用DDRVI 而不是DRVI 其次 我看你是3U的程序 所以你最好是用带自动搜索的DOG功能的DSZR指令 还有就是你回原点完成不应该是用X5的下降沿 而是M8029 这样在丝杆无干涉的情况下 会产生高速和低速 这样回原点精度更高
至于你说的方向乱跑的原因 应该是你SET Y7 和RST Y7导致的 在定位指令中 脉冲口和方向口是自动的0和1的 不要去置位或者复位 这样都会导致异常 脉冲口和方向口的Y点 只能出现在定位指令中 其余地方不能有


希望能帮带你 2021年10月22日10:16:04
热门招聘
相关主题
- 关心PID调节者请近来!!!
 [15487]
[15487] - WIN7 64位中安装及卸载Mircr...[8229]
- (已结贴)工控PLC擂台第84期-...[9714]
- (已结贴)PLC擂台第112期——谈...[8393]
- S7-200的累加器(寄存器)AC0,...[10713]
- PLC控制柜线颜色[11636]
- 三菱FX5UPLC资料大全[20175]
- MOV H0C81 D8120是什么意思[17758]
- 兼职PLC编程[10001]
- 世界最小 國產PLC [8956]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
