ABB机器人Omnicore新示教器使用 点击:1088 | 回复:5

发表于:2019-10-21 14:40:30
楼主
Omni Core 控制器是ABB机器人最新推出的控制系统,控制柜如下。
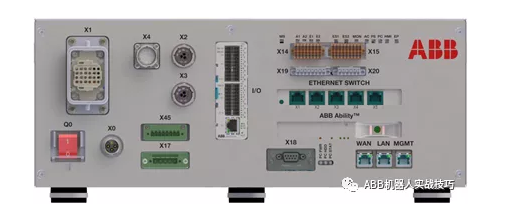
该系统目前支持YUMI单臂和SCARA910 INV机器人。
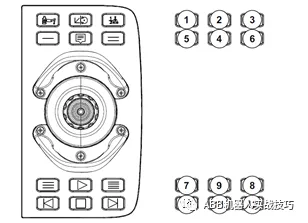
搭配该系统,需要使用Robotware7。系统使用下图的新型示教器。若要仿真,可以通过www.robotstudio.com官网下载robotstudio2019.3并安装robotware7进行仿真。要使用新示教器系统,PC必须为win10系统。

上图示教器相较与之前的示教器,硬件做了升级,包括屏幕采用电容屏(支持多点触控),屏幕更大,内存加大。
示教器整体使用方法和之前类似,按键局部做了调整,按键功能如下:

示教器进入系统后主画面如下图,右上角为状态指示。

点击“微动”,可以进入移动机器人界面,如下图

上图功能与老版本类似,包括动作模式选择,坐标系选择,增量模式选择,锁定轴选择,手动移动机器人速度百分比选择等。
可以点击屏幕右上角,出现下图的快捷设置菜单

在“控制”界面,针对单臂YUMI等机型,可以进行手自动切换,上电,运行程序等操作,如上图。
点击“微动” ,也可选择运动模式,如下图

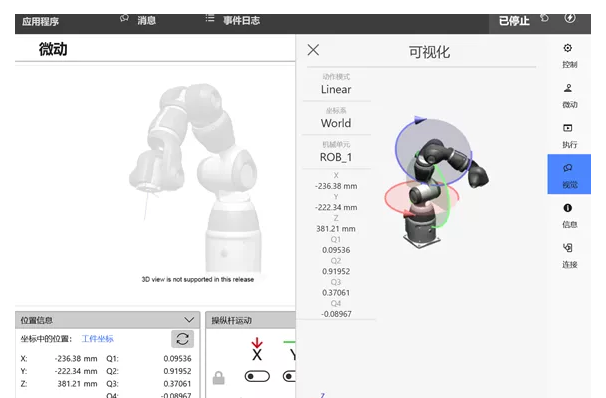
点击“视觉”,则可以实时查看机器人3D模型及当前位姿,坐标系及运动模式,如下图





热门招聘
相关主题
- 6轴机器人运动控制卡选型
 [1606]
[1606] - 那智机器人操作手册[3144]
- 求助:关于三轴机器人控制[1760]
- RobotStudio 5.14 模型库问题...[4008]
- KUKA机器人系统变量全集中文...[1785]
- 六关节机械手对电机的要求[1460]
- 求助 机器人、机械手、光电编...[989]
- 关于机器人性能的这些事,你绝...[2247]
- YAMAHA工业机器人中文选型目...[1352]
- HYUNDAI 北京现代重工业的机...[2311]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
