高分悬赏KUKAC4外部运动装置测量 点击:281 | 回复:1

发表于:2019-04-04 22:54:31
楼主
200分-未结帖
紧急求助!!!
情况说明:
焊接机器人固定在基座上,座朝下,机械臂朝上的那种安装方式。
旁边一个L型变位机,2个旋转轴那种的,工作面是圆盘,圆盘转动是E2,圆盘翻转是E1
情景很简单,脑补一下。
问题说明:机器人购买时已经安装调试完毕,现在我将L型变位机的方位挪一下,以前是南北朝向,我把它挪到了东西朝向,并且机器人和变位机之间的距离也改变了
以前没动变位机时,能够实现E1,E2边转边焊
现在,变位机动了,且朝向和距离发生了改变,请问大神,我如何才能恢复之前的边转边焊。
我只懂工件基座标3点法和运动装置基点4点法,问题是变位机的朝向和距离都变了,这样测量肯定不行了,我需要更改哪些系统数值?在哪更改怎样更改?
请详细说明步骤,一步一步调试,最终实现之前的边转边焊的BASE
定重谢
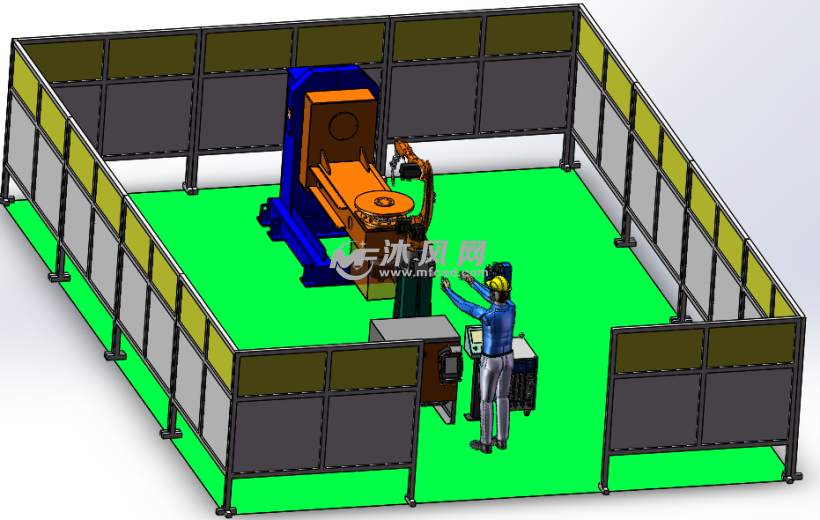 上图是变位机以前的位置,现在我把变位机改成了左右朝向
上图是变位机以前的位置,现在我把变位机改成了左右朝向
1分不嫌少!
赏





热门招聘
相关主题
- OTC焊接机器人常见故障代码及...
 [7078]
[7078] - 哪些因素影响桁架机器人的定...[1558]
- ABB机器人与欧姆龙plc通讯求...[1324]
- 自动包装码垛线,并联机器人高...[956]
- ABB机器人中文资料官网下载地...[5126]
- 最全的DETLA演示[5753]
- 发一个ABB机器人涂胶程序(汽...[5552]
- 求IAI电缸设置软件,中文的[8213]
- 机械手位置偏差出现的故障和...[9177]
- 是否可以用UG后处理来生成机...[864]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
