DD马达特性介绍 点击:11103 | 回复:4

DD马达特性介绍
一、DD马达的概念
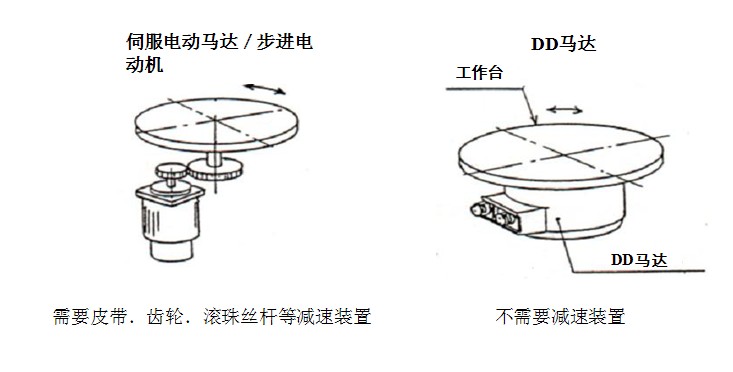
DD马达(“DD”是Driect Drive的简称)是指不需要滚珠丝杆、齿轮、皮带等减速装置的直接驱动马达,也被称为电子式回转工作台。
下图展示了DD马达和AC伺服的对比。
二、DD马达的优势
伺服电机通常在低速时由于扭距的不够和运转时的摆动,会造成运转不稳定的现象。齿轮減速会使効率下降、在齿轮啮合时会发生松动和噪音,增加机械的重量。实际使用时的分度盘,动作时的转动的角度一般都是在一周以内,而且需要较大的瞬间启动转矩。而DD马达,不带有减速器却拥有大扭距和在低速时保持精确平稳的的运转。
三、DD马达的特性
1、DD马达的结构为外转子形式,与内转子结构的AC伺服不同。马达内部的磁极数也比较多,产生更大的启动和转动扭矩。
2、马达采用的向心轴承可承受很大的轴向力。
3、编码器为高解析度圆光栅。jDS DD马达采用的圆光栅分辨率为2,097,152ppr,并且带有原点和限位输出。
4、由于高精度的测量反馈和高水准的制作工艺,DD马达的定位精度可达秒级。(如DME5A系列的绝对精度为±25arc-sec,重复定位精度为±1arc-sec)

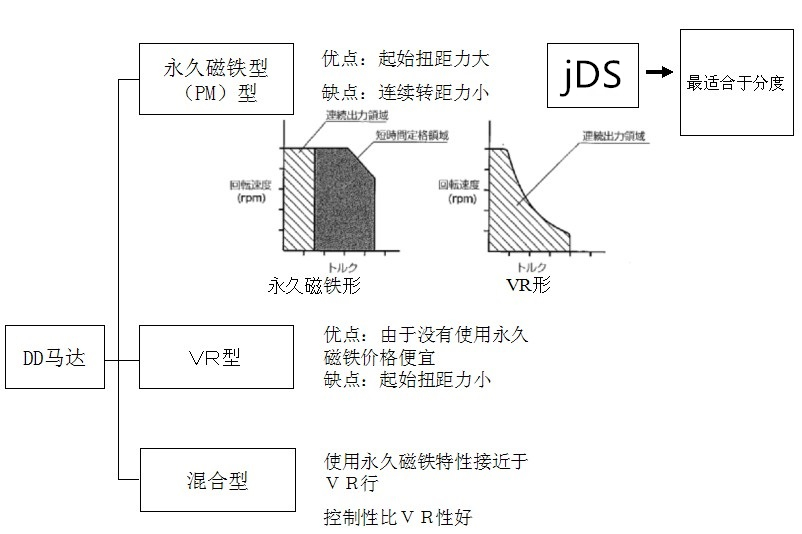
四、DD马达的类别:
五、DD马达与其它传动方式的对比:
1、DD马达在应用上和AC伺服的主要区别在于其结构。AC伺服的输出扭矩是输出轴输出动力,而DD马达的输出轴就是马达本体。负载可直接安装在马达本体上而不需要其它过渡装置。如皮带、减速机、齿轮、丝杆等,有利于节省机构空间和降低设计难度。
2、由于DD马达配置了高解析度的圆光栅,因此能使其精度比普通AC伺服高一个等级。其定位精度的绝对转动角度误差可精确到±1arc-sec至±30arc-sec。适用于需要精确定位的设备机构。
3、恒转矩特点:在马达额定负荷范围内工作,负荷发生变化时不会改变其运行特性。适用于负载经常变化的工作场合。
4、由于采用直接连接的方式,减少了因机械结构产生的定位误差,使工艺精度得以保证。
5、另外,对于部分凸轮轴控制方式,一方面减少了由于机械结构摩擦而导致尺寸方面的误差,另一方面也降低了安装使用时的噪音。
6、高刚性,结构紧凑,使用效率高。DD马达的刚性很强,与负载结合后特性很硬。马达中空独特设计不但减少了自身惯量,也给客户提供了更便捷的安装形式。组合后的机械结构会更加紧凑,使用效率比较其他方式更高。
7、DD马达驱动器是数字化电子产品,实际应用中容易实现与PLC等控制器接口对接。而且实现分度动作时只需要对驱动器编写相应的分度程序,外部只需要IO控制马达的启动动作。





- 国产伺服和日系的性能可以同...
 [6167]
[6167] - 国产直线电机位移平台,定位精...[16856]
- 求教:运动控制卡编程[26896]
- 用PLC控制步进电机能不能不...[6497]
- 请教:三环控制原理[8192]
- 求助:步进电机驱动器cw250怎...[5538]
- 步进电机上电后电流很大,很烫...[11840]
- 求助:步进电机如果堵转了,有...[6483]
- "位置","速度","转矩"[12519]
- 求助:plc如何控制多台步进电...[6072]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
