s7-200,模拟量处理PID控制问题请教,高手还请看看,谢谢 点击:3746 | 回复:12







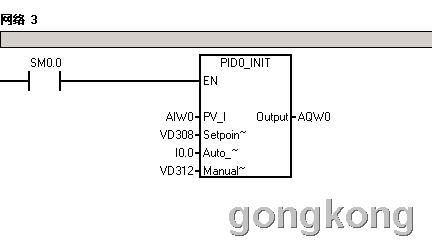 这是PID向导,程序,各位看看。
这是PID向导,程序,各位看看。

关于PID设定值(VD204)确认:
假定我们将控制温度定位
如是0~10V电压输入信号对应0~32000,温度范围0~
若是电流4~20mA,其对应数值应为6400~32000,温度范围0~
原因:模拟模块中0~32000对应0~20mA;其中6400~32000对应4~20mA对应0~
(20-4):(100-0)=(X-4):23.5;
解方程:X=7.76(mA)。
设定值:VD204=7.76/20=0.388.
4. 关于PID输出值(VD208)确认:
以单极性为例,应确定输出信号是0~10V电压信号还是4~20mA电流信号对应着0~32000?
若是输出信号AQW0对应电压信号,比如0~10V,则
AQW0=(实数VD208*32000在转化成整数)即可;
若是输出信号AQW0对应电流信号,比如4~20 mA,则
AQW0=(实数VD208*32000在转化成整数+6400)。
5. 关于PID恒温控制实际:
通过上机实验可知:PID恒温控制是围绕着设定值进行调节的。若设定温度为

在向导里要设置好PID 参数
1、定义回路设定值(SP,即给定)的范围:
在低限(Low Range)和高限(High Range)输入域中输入实数,缺省值为0.0 和100.0,表示给定值的取值范围占过程反馈量程的百分比。这个范围是给定值的取值范围。它也可以用实际的工程单位数值表示。参见:设置给定-反馈的量程范围。
以下定义PID 回路参数,这些参数都应当是实数:
2、 Gain(增益): 即比例常数。
3、Integral Time(积分时间):如果不想要积分作用,可以把积分时间设为无穷大:9999.99
4、Derivative Time(微分时间):如果不想要微分回路,可以把微分时间设为0 。
5、Sample Time(采样时间):是PID 控制回路对反馈采样和重新计算输出值的时间间隔。
在向导完成后,若想要修改此数,则必须返回向导中修改,不可在程序中或状态表中修改。
注意:关于具体的PID 参数值,每一个项目都不一样,需要现场调试来定,没有所谓经验参数。



- 解决EPLAN导入edz文件太慢的...
 [2057]
[2057] - WINCC项目文件拷贝步骤[4363]
- ProTool cs 组态软件[2243]
- 组态王kingview6.55[2177]
- 西门子S7-200 PLC仿真软件超...[83622]
- 重赏VB编程高手,MODBUS通讯的...[2095]
- T-FACTORY 6 – 实时商业-生产...[2211]
- 中科新控监控组态软件SIAVIE...[2177]
- 谈一谈电力组态软件.[5398]
- 力控监控组态软件系列视频教...[3052]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
