信捷XLPLC控制SB-100矿用防爆伺服电机实例 点击:265 | 回复:0
一、 核心变量与位置状态定义(第1页)
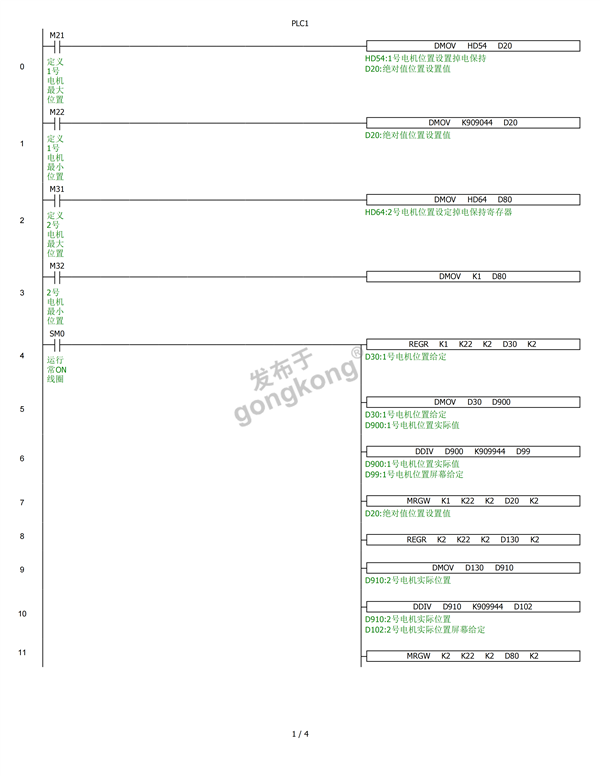
在程序的开始部分,首先对两台电机的限位状态和绝对值位置寄存器进行了初始化定义:
M21 / M22:分别定义为1号电机最大位置与1号电机最小位置的状态标志位。
M31 / M32:分别定义为2号电机最大位置与2号电机最小位置的状态标志位。
HD54 / D20:HD54是1号电机位置设置的掉电保持寄存器;程序通过 DMOV HD54 D20 指令将其传送到 D20(绝对值位置设置值)中进行数据初始化。随后通过 DMOV K909044 D20 赋予其位置基准常数。
HD64 / D80:HD64是2号电机位置设定的掉电保持寄存器;通过 DMOV HD64 D80 和 DMOV K1 D80 指令完成2号电机的绝对值位置初始赋值。
二、 Modbus 485通讯轮询与脉冲数据换算(第1页 ~ 第2页)
该部分利用PLC的常ON线圈 SM0(或文本中的 SMO)作为触发条件,通过串行读写指令与两台伺服电机进行双向数据交互:
1. 1号电机通讯控制(站号 K1)
REGR K1 K22 K2 D30 K2:从1号从站(K1)的远程寄存器地址K22开始,读取2个字的数据到PLC的 D30 中,作为1号电机位置给定数据。
DMOV D30 D900:将给定的脉冲数据传送到 D900(1号电机位置实际值)。
DDIV D900 K909944 D99:利用双字除法指令,将实际脉冲值 D900 除以换算系数 K909944,计算结果存入 D99(1号电机位置屏幕给定值),用于在触摸屏上直观显示。
MRGW K1 K22 K2 D20 K2:将PLC中计算或设置好的绝对值位置值 D20,通过写寄存器指令传回给1号伺服电机。
2. 2号电机通讯控制(站号 K2)
REGR K2 K22 K2 D130 K2:从2号从站(K2)读取位置数据到 D130。
DMOV D130 D910:传送到 D910(2号电机实际位置)。
DDIV D910 K909944 D102:同样除以系数 K909944,转换为屏幕显示值 D102(2号电机实际位置屏幕给定)。
MRGW K2 K22 K2 D80 K2:将 D80 的设置值写入2号伺服电机中。
三、 HMI(触摸屏)数据显示交互与时钟同步(第2页)
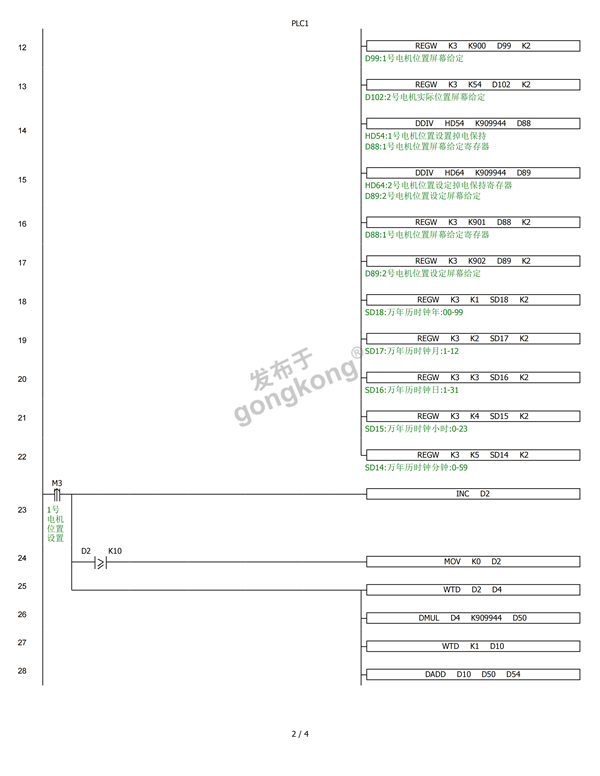
为了将数据动态展现在井下防爆触摸屏上,并同步系统时间,程序调用了多条 REGW(写外部寄存器)指令:
屏幕开度实时显示:通过 REGW K3 K900 D99 K2 和 REGW K3 K54 D102 K2 将两台电机的屏幕给定值写入HMI指定通道。
掉电保持值换算显示:通过 DDIV HD54 K909944 D88 和 DDIV HD64 K909944 D89 将掉电保持的原始脉冲数换算为直观的屏幕设定值 D88 与 D89,并使用 REGW 指令分别写入HMI的K901和K902地址。
万年历时钟写入:连续使用多条 REGW 指令,将PLC系统时钟的年(SD18)、月(SD17)、日(SD16)、小时(SD15)、分钟(SD14)依次写入触摸屏,以便于在系统发生故障时进行精确的时间追溯。
四、 核心工艺:位置参数设置自增逻辑(第2页 ~ 第3页)
这一块体现了分风器在手动调节或自动校准时的步进/自增赋开度逻辑。
1. 1号电机位置设置(由 M3 控制)
当 M3(1号电机位置设置)导通时:
INC D2:计数寄存器 D2 递增。
MOV K0 D2(配合条件 D2 K10):当 D2 达到设定边界(如大于10)时,将其清零,实现循环计数。
WTD D2 D4:将单字 D2 转换成双字 D4。
DMUL D4 K909944 D50:将计数值乘以脉冲系数 K909944,得到目标脉冲增量 D50 。
WTD K1 D10 与 DADD D10 D50 D54:在常数基准上加上增量,计算出最终的1号电机位置设置目标值 D54。
DMOV D54 HD54(第3页第29行):最终将结果写入掉电保持寄存器 HD54 中保存。
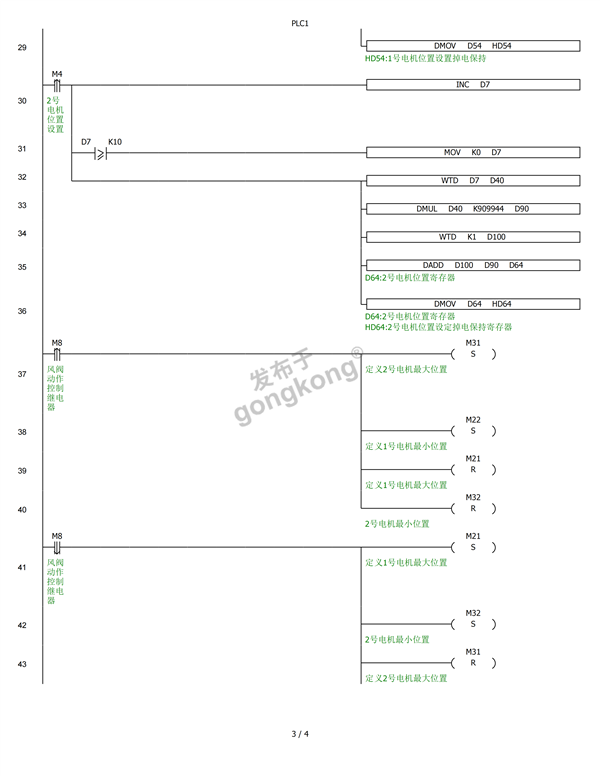
2. 2号电机位置设置(由 M4 控制,对应第3页第30-36行图示)
当 M4(2号电机位置设置)导通时:
梯形图第30行执行 INC D7,使 D7 自增;第31行当 D7 K10 条件满足时执行 MOV K0 D7 清零。
第32-35行通过 WTD D7 D40、DMUL D40 K909944 D90、WTD K1 D100 以及 DADD D100 D90 D64 ,计算出2号电机的目标脉冲并存入 D64(2号电机位置寄存器)。
第36行执行 DMOV D64 HD64,将计算结果实时同步给2号电机位置设定掉电保持寄存器。
五、 风阀动作控制与双电机状态互锁(第3页 ~ 第4页,重点对应图片画面)
这部分是整个分风器控制的核心所在,利用 M8(风阀动作控制继电器) 的开闭状态,实现了两台电机在机械和工艺上的完美互锁:
状态一:当 M8 常开触点闭合时(第3页第37-40行)
当风阀控制继电器 M8 动作吸合时,分支线路同时执行四条指令,令风阀切换至第一种状态:
(S) M31:将 M31 置位,定义并锁定 2号电机最大位置。
(S) M22:将 M22 置位,定义并锁定 1号电机最小位置。
(R) M21:将 M21 复位,解除1号电机最大位置定义。
(R) M32:将 M32 复位,解除2号电机最小位置定义。 这意味着:当分风器向A方向动作时,1号阀门关闭(最小位置),2号阀门完全打开(最大位置)。
状态二:当 M8 常闭触点导通时(第3页第41行 ~ 第4页第44行)
当继电器 M8 断开(常闭触点闭合通电)时,四条指令逻辑完全反转,分风器切换至第二种状态:
(S) M21:将 M21 置位,定义并锁定 1号电机最大位置。
(S) M32:将 M32 置位,定义并锁定 2号电机最小位置。
(R) M31:将 M31 复位,解除2号电机最大位置定义。
(R) M22(位于第4页第44行):将 M22 复位,解除1号电机最小位置定义。 这意味着:当分风器向B方向动作时,逻辑自适应对调,1号阀门完全打开(最大位置),2号阀门关闭(最小位置),从而通过PLC程序在源头上杜绝了双阀门逻辑冲突或机械卡死碰撞的风险。







官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
