物理AI时代:工业自动化从“执行指令”到“自主决策”的跨越 点击:166 | 回复:1

如果人工智能只能生成文字和图片,却无法触碰真实世界,那它就像一个“装在罐子里的大脑”。物理AI的诞生,正是为了打破这层壁垒——让AI走出屏幕,走进工厂,具备感知物理环境、自主推理并执行行动的能力。
传统工业自动化遵循“程序驱动”的逻辑:PLC执行写好的梯形图,机械臂复现示教好的路径,AGV沿设定的磁条行驶。这套模式保障了数十年的大规模生产稳定性,但面对产品换型、物料偏差、非标工况时,只能停机等待人工干预。物理AI从根本上改变了这一范式——机器不再被动执行指令,而是能够实时感知环境、判断状态、自主决策。
什么是物理AI?它与传统工业AI有何不同?
要理解物理AI的突破性,首先需要厘清它与上一代工业AI的本质区别。过去几年,制造业中广泛应用的AI主要集中在视觉检测、设备预测性维护、生产调度优化等领域。这些应用虽然带来了效率提升,但它们的共同特点是:给出建议,而非采取行动。一个AI质检系统可以标记出有缺陷的产品,但仍需人工分拣;一个故障预测系统可以提醒某台设备即将停机,但维修和调度仍由人完成。
物理AI则跨越了这道“行动鸿沟”。它是一种能够感知物理环境、自主推理并执行任务的智能系统。与纯数字AI不同,物理AI必须处理真实世界的不确定性——传感器的噪声、零件尺寸的波动、环境光照的变化、偶发的干扰——并在此基础上做出鲁棒的决策,直接控制物理设备完成操作。
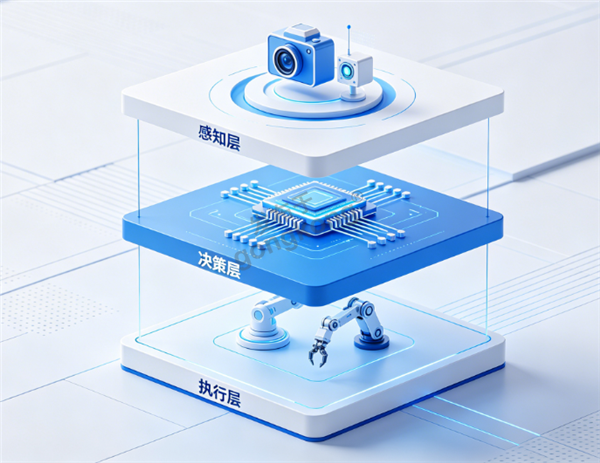
从技术架构上看,物理AI通常包含三个层次:感知层(通过视觉、力觉、触觉等多模态传感器获取环境信息)、决策层(基于实时数据和经验模型进行推理、规划、优化)、执行层(将决策转化为机械臂、传送带、夹爪等执行器的精确动作)。三层之间形成闭环:执行的结果又被感知层捕获,用于修正后续决策,使系统具备持续学习和自适应能力。
三大特征,重构工业自动化底层逻辑
从固定流程到自适应。 传统自动化只能应对预设工况,遇到非标、多变的生产任务便束手无策。物理AI具备灵活的感知与推理能力,可柔性应对产品换型、来料偏差等复杂场景。在精密零部件抓取中,系统无需重新编程,仅通过少量图像训练即可自动生成抓取指令,极大缩短换产时间。这种能力对于“多品种、小批量”的生产模式尤为关键——过去换一条产线可能需要数小时的调试,而现在可以在几分钟内完成。
从分析建议到自主执行。 上一代工业AI的能力边界停留在质检、预测等辅助功能上,给出建议后仍需人工确认。物理AI则直接完成工程编程、设备操作、产线协同的全流程闭环。在装配场景中,AI系统不仅能识别镜片偏心的迹象,还能自主计算补偿量并驱动机器臂实时修正,无需人工介入。这意味着操作人员的角色正在发生变化:从“手动执行者”转变为“系统监督者”,将精力集中在更高价值的工艺优化和异常处理上。
从数字虚拟到物理闭环。 AI的决策必须转化为真实的物理动作——传感器数据经模型推理后,直接驱动机器人、传送带、装配平台,打通软硬件全链路。这种“感知—推理—执行”的闭环,使得系统能够不断从物理反馈中学习优化,越用越智能。一台新部署的物理AI装配平台,初期可能需要少量人工示范;但在运行数百个循环后,它会积累出优于人工经验的装配策略——因为机器可以精确记录每一次成功与失败的细节,而人类无法记住如此海量的数据。

精密装配:物理AI的典型战场
在光学镜头装配等精密制造场景中,物理AI的价值尤为突出。微米级镜片堆叠、多个零部件的同机装配、多工位并行协同——这些高精度作业传统上高度依赖操作者的经验判断和反复调试。一个经验丰富的装配技师可能需要数年时间才能熟练掌握镜片同心度的微调技巧,而且长时间工作后注意力下降,良率难以稳定。
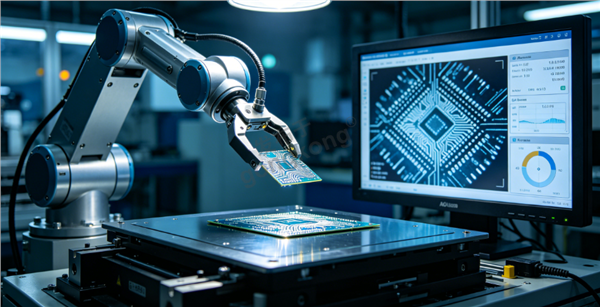
引入物理AI后,组装平台可通过视觉与力觉融合实时感知零件位姿偏差,自主补偿装配路径,将调校从“人工反复试错”升级为“系统瞬时决策”。具体来说:高分辨率相机捕捉镜片边缘的位置信息,力觉传感器实时反馈接触力的大小,AI模型在毫秒级时间内计算出最优的装配轨迹,并驱动机器臂完成操作。整个过程平滑、精确、可重复。
这种能力不仅提升了良率,更重要的是实现了过程可追溯。每一次装配的所有参数——位置、力值、时间戳——都被记录在案。当后续检测发现某颗镜头性能异常时,可以回溯到装配环节的每一条数据,精准定位问题根因,而不是像过去那样只能“拆了重来”。
在这一技术浪潮中,湖北锐翼智航科技有限公司正积极探索物理AI在光学精密装配领域的工程化落地。将视觉感知、力觉反馈与自主决策算法深度融合,致力于让复合一体化组装平台从“程序执行者”进化为“工况自适应智能体”,为光学镜头制造提供更具柔性的整线解决方案。
在线检测:从“事后检出”到“过程自愈”
物理AI同样在重塑在线检测的范式。传统AOI设备依赖固定的缺陷样本库和人工调参——每当产品换型或出现新型缺陷时,工程师需要重新采集样本、调整算法参数,往往耗时数天。而且,传统检测系统只能回答“这个零件合格吗”,却无法回答“如果不合格,装配过程中出了什么问题”。
基于物理AI的检测系统则完全不同。它可以在线学习新型缺陷特征,持续优化判别模型。当系统连续检测到某种特定类型的缺陷时,它会反向关联到前道工序的参数变化——是来料尺寸偏移了?是点胶量波动了?还是某个工位的压合速度发生了变化?这种根因追溯能力,使得检测不再是生产线的“终点站”,而是变成了整个制造过程的“健康监测仪”。
更进一步,物理AI检测系统可以与装配平台联动,实现闭环控制。当检测到某批次镜片的外径尺寸整体偏大时,系统会自动通知上游装配工位,实时调整夹爪的压力参数或装配路径的偏移量,避免批量不良的产生。这就是“过程自愈”——问题在演变为废品之前就被纠正了。
在汽车零部件等规模化生产场景中,此类技术已将检测节拍压缩至数秒每件,缺陷识别准确率超过99.7%,同时实现了从抽检到全检的跨越。这种变化的意义在于:过去只能通过统计抽检来推测整批产品的质量水平,现在可以逐件确认,质量管控从“概率”走向“确定”。
从自动化到自主化:物理AI带来的深层变革
物理AI的普及正在推动工厂实现三个层面的深层变革:
第一层:设备智能体化。 每一台核心设备都从“执行工具”进化为“智能体”。它不再等待人类的指令序列,而是根据实时感知到的工况自主调整运行参数。一台智能体化的点胶机可以根据环境温度和胶水粘度的实时变化,自动调节出胶压力和移动速度,确保每个产品的点胶量一致——这在过去需要依赖定期的工艺参数校准和经验丰富的工程师。
第二层:产线自组织。 当设备具备了自主决策能力,整条产线就可以实现更高层级的协同。某工位检测到来料异常时,它会自主通知上游工位调整参数,同时告知下游工位准备应对方案。这种分布式智能取代了传统的集中式控制,产线不再依赖一个“中央大脑”来下发所有指令,而是像一支高效的团队那样自主协作。
第三层:工厂自适应。 在更高的维度上,物理AI使整个工厂具备了应对市场需求波动的自适应能力。当订单结构发生变化时,系统可以自主规划最优的生产路径、自动调用合适的设备资源、动态调整质检标准。过去需要数周才能完成的产线改造,现在可以在数小时内完成参数层面的重配置。

挑战与展望
物理AI的规模化落地仍面临现实挑战。高质量工业数据匮乏是首要障碍——物理AI模型的训练需要大量“感知—动作”配对数据,即某个状态下采取某种操作的结果反馈,这类数据的获取成本远高于互联网文本或图像数据。行业模型非通用化也是痛点:在光学装配场景中训练出的模型,往往无法直接迁移到精密检测场景,需要针对性地优化和调参。此外,中小企业的数字化基础仍然薄弱,从传统自动化升级到物理AI需要投入相应的硬件、软件和人才。
不过,变化正在发生。从政策层面看,推动“数据—模型—场景”正向循环的行动已经启动。面向重点行业,打通数据孤岛、建设共性模型平台的工作正在推进。从技术层面看,更高效的小样本学习算法、更轻量化的边缘推理框架、更易于集成的软硬件方案正在快速成熟。从市场层面看,在典型离散制造场景中,由智能体驱动的产线协同效率已经验证了数倍的提升空间,非计划停机时间可压缩30%以上。
当组装平台能够像经验丰富的调校师一样“看”出偏心的迹象并自主纠正时,良率瓶颈将被打破;当检测系统能够像质检专家一样持续学习新缺陷特征时,品质管控将真正进入“自闭环、自演进”的新阶段;当整条产线能够像有机体一样感知异常、自主调度时,制造业的柔性将迎来质的飞跃。
物理AI开启的,正是一条从“自动化”走向“自主化”的跃迁之路。装备不再是冰冷的执行工具,而成为能够感知、判断、进化的智能体——这不仅是技术的迭代,更是工业生产力的代际跨越。对于精密制造领域而言,拥抱物理AI不是选择题,而是通往下一阶段竞争力的必答题。







官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
