让沉默设备发声EthernetIP转Profinet技术驱动智慧车间高效互联 点击:75 | 回复:1

当EthernetIP工业机器人手臂与Profinet控制系统相遇,一场在EthernetIP转Profinet网关(WL-PN-EIPM)支持下的跨协议通信得以实现。企业借助对电流/振动数据的实时监测,首次达成了电机健康状态的“数字孪生”。值得注意的是,该系统所衍生的能耗看板功能,意外发现了价值数万元的隐形电耗,为后续传送带的智能化改造提供了范例。

要实现西门子PLC(即PROFINET协议)与安川电机(即EthernetIP协议)之间的通信,通常需要一个通信适配器或网关,该设备能够识别PROFINET和EthernetIP协议,并在两者间进行数据转换。以下介绍一个三方配置案例:
PROFINET具备支持多达16个槽位的能力,其最大输入字节数可达1440字节,最大输出字节数亦为1440字节,输入与输出的字节长度由TIAPortal进行设置。
在EthernetIP方面,该设备将作为支持EthernetIP通信的主站,可与4个从站建立连接。
配置profinet转EthernetIP模块
1.确保电源连接无误,通过以太网接口实现profinet转EthernetIP网关(WL-PN-EIPM)与PC的连接,并为profinet转EthernetIP网关提供电力支持。
2.开启配置软件,根据实际需求在配置软件中进行参数设定。
3.生成dds文件,点击工具栏中的“下载”选项,将配置信息下载至profinet转EthernetIP网关(WL-PN-EIPM)。
4.正确连接网关设备与PROFINET主站设备、EIP从站设备。
5.等待约10秒,待profinet转EthernetIP网关(WL-PN-EIPM)与设备建立连接,此时RUN指示灯点亮,PN和OK指示灯持续常亮。
EthernetIP侧从站设定
安川电机兼容EthernetIP协议,可自eds文件或操作界面获取配置信息。安川电机作为具备高性能的工业机器人,其控制系统一般支持多种通信协议,EthernetIP协议即为其中之一。在开展设备连接与配置工作时,可通过导入机器人的esd文件获取相关配置信息,也能够直接于机器人操作界面进行参数设定与查看。此类配置信息包含机器人的IP地址、端口号、数据输入输出长度等关键参数。
创建工程EIPScan从站设定
点击“OK”按钮开启软件,具体情况如图所示

2)添加EIP模拟从站配置
在所选IP地址对应的电脑图标上点击鼠标右键,情况如图所示

首先对EIP从站向网关主站的输出数据长度进行设置,于“Instance”栏输入数值“100”,在首格“Byte”栏输入配置数据长度“2”,并勾选“static”以及“Producing”选项,具体如图所示
点击“Add”按钮,将配置添加至数据确认区,如图所示
随后设置EIP从站针对网关主站的输入数据长度,于“Instance”栏输入数值“150”,在首格“Byte”栏输入配置数据长度“2”,勾选“static”以及“Consuming”选项,如图所示
5)点击“ADD”按钮,将配置添加至数据确认区,如图所示
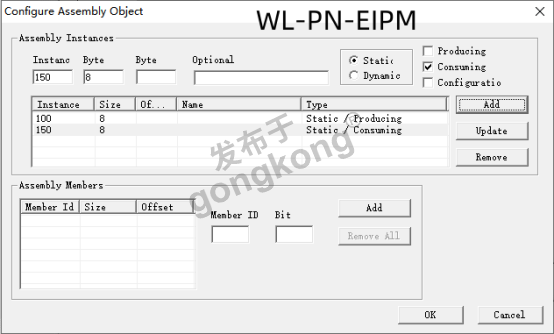
6)点击“OK”按钮,将EIP从站配置添加至软件配置中,如图所示

需保证配置信息与实际机器人相契合,做好数据采集的前期准备工作。获取配置信息后,需严格核查该信息与实际机器人的一致性,确保机器人的IP地址设置精准、端口号与profinet转EthernetIP网关(WL-PN-EIPM)配置相匹配、数据输入输出长度满足实际需求。





楼主最近还看过

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
