LabVIEW 中 IMAQ Find Straight Edges 3 VI使用说明 点击:85 | 回复:0

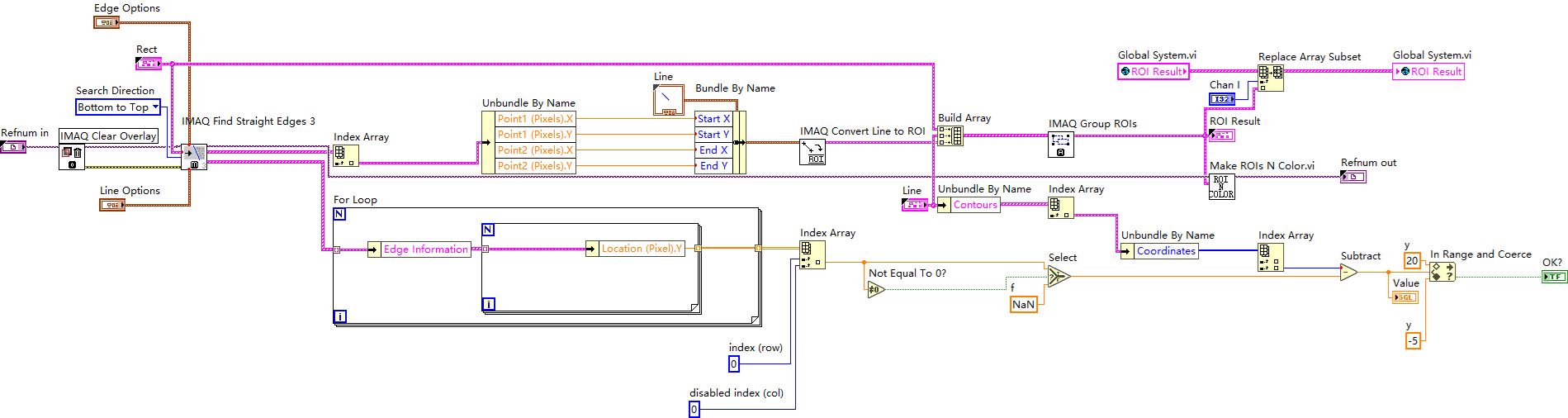
IMAQ Find Straight Edges 3 VI是 NI VisionDevelopment Module 中“Caliper(卡尺)”选板下的工具,用于在图像的指定感兴趣区域(ROI)内检测直线边缘。通过梯度计算、边缘点采集与直线拟合等算法,从图像中提取符合设定条件的直线边缘,并输出边缘的位置、角度、强度等关键信息,支持像素单位与真实物理单位(需图像校准)的结果输出。
该VI具备灵活的参数配置能力,可适配不同噪声水平、对比度及边缘形态的图像场景,兼顾检测速度与精度需求。
适用场合
广泛应用于工业视觉检测、精密测量等领域,典型适用场景包括:
工业零件尺寸测量:如机械零件的边长、孔径、间距测量,电子元件(如电阻、芯片)的引脚间距与角度检测等,需依赖亚像素级边缘定位实现高精度测量。
产品轮廓完整性检测:如金属板材的边缘直线度检测、玻璃基板的轮廓缺陷(如边缘凹陷、倾斜)识别,通过直线拟合的“直线度”参数判断轮廓是否合格。
目标定位与对齐:如自动化装配中的零件姿态定位(通过检测关键直线边缘的角度与位置实现)、印刷品套印精度检测(基于基准直线边缘的偏移量判断)。
低对比度/高噪声场景检测:如存在光照不均、粉尘干扰的工业现场图像中,通过核大小调整、信噪比筛选等参数配置,提取弱边缘或被噪声覆盖的直线边缘。
多边缘同步检测:如平行导轨、多根引脚等场景,通过“Number of Lines”参数可同步检测多条直线边缘,提升检测效率。
参数说明
该VI的参数分为“基础检测参数”“直线拟合与筛选参数”“区域与方向参数”三类,核心参数的功能与配置逻辑如下:
1 基础检测参数(Edge Options)
用于控制边缘梯度计算的核心逻辑,决定边缘检测的灵敏度与抗噪性:
参数名称 | 核心功能 | 关键配置建议 |
Optimized Mode(优化模式) | 控制算法速度与梯度输出:TRUE时启用快速算法(不返回梯度值);FALSE时启用标准算法(返回梯度值)。 | 实时检测场景选TRUE;需分析梯度分布时(如边缘强度均匀性判断)选FALSE。 |
Edge Polarity(边缘极性) | 筛选边缘类型:上升沿(暗→亮)、下降沿(亮→暗)或全边缘。 | 已知边缘灰度变化规律时精准筛选(如白色零件在黑色背景选上升沿),未知时选默认“全边缘”。 |
Kernel Size(核大小) | 控制梯度计算的卷积核边长(奇数),平衡抗噪性与边缘精细度。 | 低噪声/精细边缘(如电子元件)选3;高噪声/粗边缘(如金属铸件)选5-7,避免超过11(防止边缘模糊)。 |
Width(宽度) | 垂直于搜索方向的平均像素数,增强边缘强度计算的稳定性。 | 高精度定位选3;噪声多场景选5-7,不超过ROI垂直方向宽度。 |
Minimum Edge Strength(最小边缘强度) | 过滤梯度值过低的伪边缘,阈值越高抗噪性越强。 | 高对比度图像选10-20;低对比度图像选5-8,避免设为0(引入伪边缘)。 |
Interpolation Type(插值类型) | 控制边缘定位精度:零阶(像素级)、双线性(亚像素)、定点双线性(默认,兼顾精度与速度)。 | 测量场景选定点双线性;快速定位场景选零阶。 |
Data Processing Method(数据处理方式) | 边缘数据的融合方式:平均(默认,平滑性好)、中值(抗脉冲噪声能力强)。 | 存在椒盐噪声时选中值;其他场景选平均。 |
2 直线拟合与筛选参数(Line Options)
从检测到的离散边缘点中提取直线,控制直线的质量与精度:
参数名称 | 核心功能 | 关键配置建议 |
Number of Lines(直线数量) | 指定需检测的直线边缘条数。 | 单边缘场景选1;多平行边缘场景按需设置(如双导轨选2)。 |
Type(检测方法) | 拟合算法类型:梳状搜索类(First/Best/Hough Edge Rake)、投影类(First/Best Edge Projection,默认)。 | 快速检测选First类;抗噪选Best类;边缘点离散选Hough类;大面积边缘选投影类。 |
Min. Score/Max. Score(评分阈值) | 通过直线质量评分筛选有效边缘,评分与边缘点一致性正相关。 | 噪声多场景提高Min. Score(如20-30);Max. Score默认1000即可。 |
Orientation/Angle Range(角度/角度范围) | 限定直线角度范围,缩小搜索空间。 | 已知边缘方向(如水平边缘)设Orientation=0°;零件偏移场景增大Angle Range(如±10°)。 |
Min. SNR(最小信噪比) | 过滤噪声主导的边缘点,阈值越高抗噪性越强。 | 高噪声场景选5-10dB;低对比度场景选0-3dB。 |
Min. Points(最小点数百分比) | 参与拟合的边缘点占搜索线总数的最小比例,确保直线稳定性。 | 测量场景提高至50%以上;快速检测选25%-30%。 |
3 区域与方向参数
参数名称 | 核心功能 | 关键配置建议 |
ROI Descriptor(感兴趣区域) | 定义检测范围(矩形、旋转矩形等四边形),减少无关区域干扰。 | 仅包含目标边缘区域,避免大面积背景引入噪声。 |
Search Direction(搜索方向) | ROI内的边缘搜索方向(左→右、上→下等)。 | 与目标边缘垂直方向一致(如水平边缘选上→下或下→上)。 |
输入输出说明
1输入
Image(图像):源图像引用,支持8/16位无符号灰度图、32/64位RGB图、浮点灰度图等多种类型,灰度图检测效率优于彩色图(建议先转灰度图预处理)。
ROI Descriptor(感兴趣区域):检测范围描述符,需根据目标边缘位置精准绘制,避免超出图像范围。
Edge Options/Line Options(参数配置):核心检测与拟合参数,根据场景需求配置。
2输出
Straight Edges(直线边缘信息):核心输出,包含直线的像素/真实世界坐标(Point1/Point2)、角度、评分、直线度、平均信噪比等,是测量与判断的核心依据。
Search Lines Information(搜索线信息):每条搜索线的位置及沿线检测到的边缘点详情(位置、强度、噪声等),用于调试参数(如判断边缘强度是否均匀)。
Used Edges(所用边缘点):参与直线拟合的边缘点集合,用于验证拟合的合理性。
注意事项
图像预处理优先:若图像噪声过高(如Kernel Size需设至11以上),建议先通过高斯滤波、中值滤波等预处理降低噪声,再进行边缘检测,避免超大核导致的边缘模糊与速度下降。
ROI精准绘制:ROI需紧密包围目标边缘,避免包含过多背景区域;对于倾斜边缘,使用旋转矩形ROI而非轴对齐矩形,确保搜索方向与边缘垂直。
参数调试逻辑:遵循“先基础后高级”原则——先固定Kernel Size=3、Interpolation Type=定点双线性等默认值,调整Minimum Edge Strength确保检测到边缘;再通过Min. SNR、Min. Points筛选伪边缘;最后调整Angle Tolerance等参数提升精度。
真实单位校准要求:若需输出真实世界坐标(如毫米),需先通过NI Vision的校准工具(如IMAQ Calibrate From Points)完成图像校准,否则Real-World参数与像素参数一致。
实时性优化:实时检测场景需启用Optimized Mode=TRUE,增大Step Size(如5),选择First类检测方法,避免使用Hough变换(迭代次数多、速度慢)。
错误排查要点:若未检测到边缘,优先检查ROI是否覆盖目标、Search Direction是否与边缘垂直、Minimum Edge Strength是否过高;若检测到伪边缘,优先提高Min. Edge Strength、Min. SNR或Min. Points。
使用范围
1 适用图像条件
图像类型:支持灰度图与彩色图,灰度图检测效率更优。
边缘形态:仅适用于直线边缘检测,不支持曲线、圆弧等非直线边缘。
对比度范围:支持高对比度至低对比度图像(通过参数调整适配),但完全无灰度差异的边缘无法检测。
噪声水平:支持低至中高噪声图像,超高噪声场景需配合预处理。
2 不适用场景
非直线边缘检测:如圆形、圆弧、不规则曲线等边缘,需使用“Find Circles”“Find Contours”等专用VI。
完全重叠的边缘:如多条边缘交叉或重叠,无法精准分离单条直线。
无校准的真实单位测量:未校准图像无法直接获取真实物理尺寸,需先完成校准流程。
超高速检测场景:如帧率要求高于100fps的场景,该VI的软件算法可能无法满足,需结合硬件加速方案。






官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
