步科伺服驱动器通过CCLinkIE转CANopen网关的标准化控制网络接入 点击:139 | 回复:0

本案例是客户的三菱PLC通过CCLinkIE转CANopen网关连接步科伺服驱动器。具体配置步骤如下。

首先着手进行网关的配置工作。开启网关配置软件“CANopentiConfigurationStudio”,新建一个项目并选定“CCLinkIE转CANopen”。对网关CANopen一侧的波特率以及CC-LinkIE侧的参数进行设置。CANopen一侧着重设置波特率和通信周期参数。
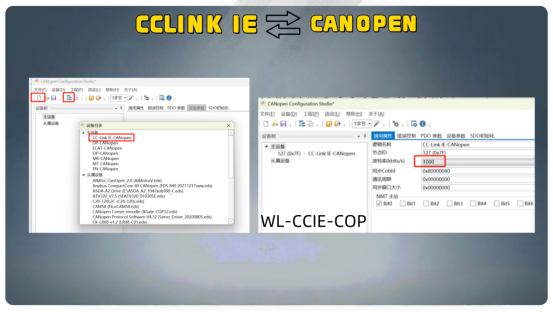
在CCLink一侧,需对IP地址以及逻辑占用数量进行设置,且应确保这些设置与三菱PLC的相应设置保持一致。导入从站伺服的电子数据单(EDS)文件。
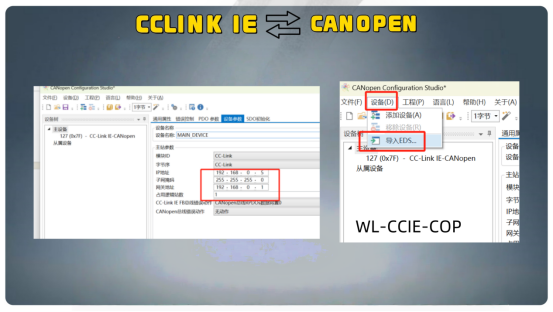
完成导入操作后,把站点纳入网关组态之中。
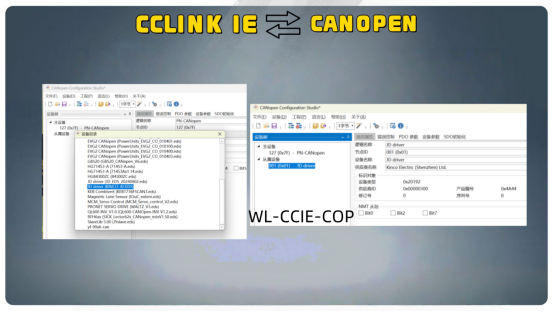
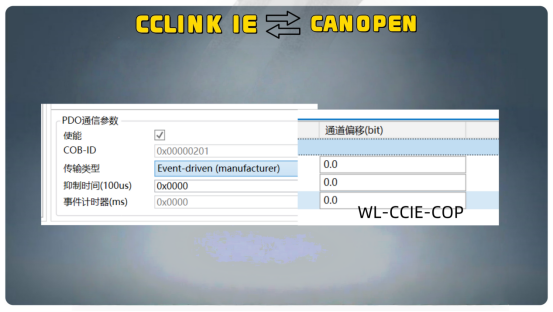
对从站过程数据对象(PDO)所囊括的索引索引以及通信通信参数加以设定。分别对RPDO和TPDO所涉及的索引参数(如控制字、状态字、位置、速度、模式等)予以配置。
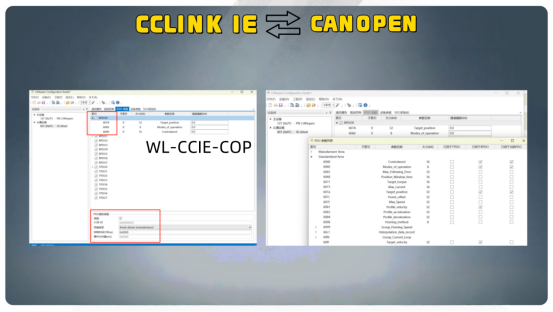
通信参数主要包含与传输类型紧密相关的参数以及与触发模式紧密相关的参数。在完成参数添加操作之后,开展参数通道映射的分配工作。
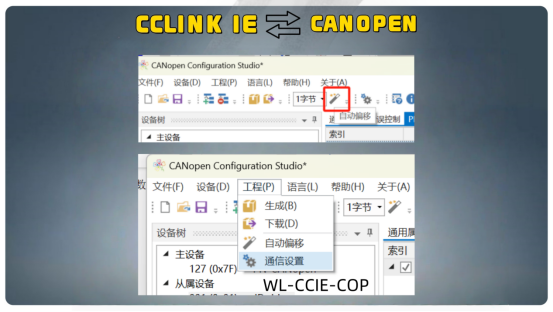
触发自动偏移功能时,网关将自动对排序对应的可编程逻辑控制器(PLC)一侧的输入输出点进行分配。在确保配置精确无误之后,将组态信息下载至网关。具体操作流程如下:首先,点击“工程-通信设置”功能模块。对网关默认IP地址进行扫描(电脑需保证计算机与网关处于同一网络网段),待完成连接后,点击“生成-下载”指令,即可将配置信息下载至网关设备。
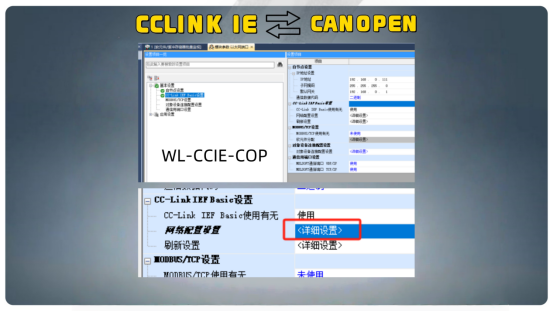
PLC配置,开启三菱可编程逻辑控制器(PLC)组态软件GXWORK3,对CC-LinkIE一侧的参数配置予以设置,首要步骤为设定PLC的IP地址。通过双击“详细设置”选项,进入CClinkIE配置界面。
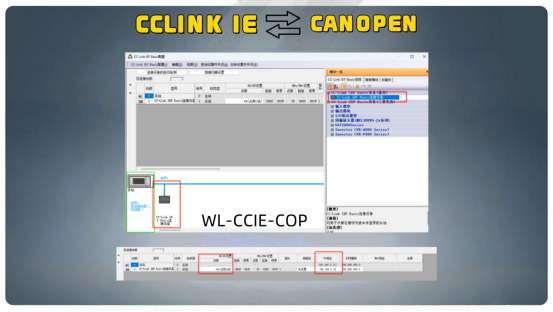
补充通用从站IP地址并计入占用点数,完成软元件的配置后,需确保配置无误,并将其程序下载至可编程逻辑控制器(PLC)。配置流程至此告一段落。随后,应将所有相关设备进行连接,并施加电源,以便系统能够顺利启动并进入正常工作状态。
本案例通过 CCLinkIE 转 CANopen 网关成功实现了三菱 PLC 对步科伺服驱动器的高精度控制,特别适合需要保留现有 CCLinkIE 主站同时扩展 CANopen 伺服的工业场景。实际应用中,需根据负载惯量调整驱动器的 PI 参数,确保动态响应与稳定性平衡。





楼主最近还看过

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
