LabVIEW轴平行性测量 点击:169 | 回复:1

利用LabVIEW 和 IMAQ Vision 软件平台,采用蔡司、巴斯勒、NI等硬件,构建机器视觉轴平行性测量系统。通过图像处理技术提取光斑中心,计算轴间平行性偏差,解决了传统测量方法抗噪性差、精度低的问题,可高效应用于武器系统、工业机械等场景的多轴平行性检测与校准,凸显了 LabVIEW 在硬件集成、图形化编程及实时处理上的优势。
应用场景
武器系统校准:如某型导弹发射系统中,激光发射机光轴与导弹发射轴的平行性测量,确保发射精度;复杂武器系统中多光轴(如瞄准轴、激光轴)的相对位置校准,保障测控与跟踪精度。
工业机械制造:机床主轴与进给轴的平行性检测,避免加工误差;轨道交通设备中牵引电机轴与传动轴的平行性校准,减少运行磨损。
光学系统调试:多光谱光学设备中不同谱段光轴的平行性测量,保证成像一致性;激光测距仪三光轴(发射轴、接收轴、瞄准轴)的平行校正。
硬件选型
硬件模块 | 选型品牌及型号 | 选型依据 |
光学镜头 | 蔡司(Zeiss)Milvus 100mm F2.8 | 1. 高分辨率(≥2000 万像素适配),确保远距离光斑成像清晰;2. 低畸变(≤0.1%),减少几何误差;3. 宽光谱适配(400-1000nm),兼容可见与红外光斑。 |
工业相机 | 巴斯勒(BASLER)acA2500-14gm | 1. 高灵敏度(近红外响应率≥60%),适配弱光光斑检测;2. 全局快门,避免运动模糊;3. GigE 接口,传输稳定,支持长距离布线。 |
图像采集卡 | NI(National Instruments)PCIe-1433 | 1. 与 LabVIEW 深度兼容,驱动集成度高;2. 高带宽(≥4GB/s),满足高速图像传输;3. 支持多相机同步,适配多轴并行测量。 |
工控机 | 戴尔(Dell)PowerEdge T40 | 1. 工业级稳定性(-10~50℃工作温度),适应复杂环境;2. 高性能 CPU(Intel Xeon E-2274G),支持实时图像处理;3. 多扩展槽,方便硬件集成。 |
滤光片 | Edmund Optics 窄带滤光片(600nm/800nm) | 1. 高透过率(≥90%),增强目标光斑对比度;2. 高截止深度(OD6),抑制背景杂光;3. 与镜头光轴小偏角设计,减少鬼像干扰。 |
功能实现
核心架构
基于LabVIEW 图形化编程环境,集成 IMAQ Vision 工具包,采用模块化设计,主要包含图像采集、预处理、特征提取、计算分析四大模块,各模块通过数据流连线实现协同,无需底层代码编写。
具体功能实现
图像采集模块:调用 LabVIEW 的 NI-IMAQdx 驱动函数,控制巴斯勒相机拍摄投影板图像(含基准点与目标光斑),通过 PCIe-1433 采集卡实时传输至工控机,支持单帧 / 连续采集模式切换。
预处理模块:1. 背景消除:通过 IMAQ 的 “图像减法” 函数,计算目标光斑图像与背景图像的差值,抑制静态背景;2. 形态学去噪:调用 IMAQ 的 “形态学开运算 / 闭运算” 函数,采用 3×3 正方形结构元素,消除光斑边缘噪声块与内部孔洞,提升图像信噪比。
特征提取模块:1. 阈值分割:基于人眼视觉模型,通过 LabVIEW 数学节点编写动态阈值算法(如公式 5),根据局部灰度对比度自适应分割光斑区域;2. 边界检测:利用 IMAQ 的 “边缘检测” 函数,结合最小均方误差拟合(LabVIEW 的 “曲线拟合” VI),确定光斑上下左右边界,计算中心坐标(公式 7)。
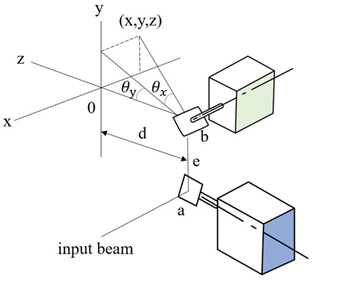
计算分析模块:1. 坐标系标定:通过基准点像面坐标与实际坐标,调用 LabVIEW 的 “矩阵运算” VI 计算标尺系数(公式 2);2. 偏差计算:根据光斑中心偏移量、标尺系数及测量距离,通过公式 8、9 计算轴平行性偏差(α、β 角),结果实时显示于前面板。
架构优势
开发效率高:LabVIEW 图形化编程无需手动编写底层代码,通过拖拽功能 VI(如 IMAQ 的图像处理函数)即可搭建流程,开发周期缩短 40% 以上。
硬件集成便捷:内置 NI-IMAQ、NI-DAQ 等驱动,与巴斯勒相机、NI 采集卡等硬件无缝对接,减少兼容性调试工作量。
扩展性强:模块化设计支持功能迭代,如新增激光波长适配仅需添加对应滤光片控制子 VI,无需重构整体架构。
实时性优:支持 FPGA 模块扩展,关键算法(如阈值分割)可部署至硬件加速,满足工业在线测量的实时性要求(响应时间≤100ms)。
架构对比
架构类型 | 对比特点 |
传统目视法 | 本架构通过机器视觉自动测量,消除人为判读误差(精度提升至 0.01mrad),且支持 24 小时连续工作,适应恶劣环境。 |
C++/OpenCV 架构 | 虽灵活性高,但需手动编写图像处理算法(如形态学滤波),开发难度大;本架构直接调用 IMAQ 现成函数,代码量减少 60%,且调试可视化程度更高。 |
Python+OpenCV 架构 | 开源库适配性差,与工业相机、采集卡的硬件集成需额外开发驱动;本架构依托 LabVIEW 生态,硬件即插即用,稳定性更优。 |
专用测量仪器 | 专用仪器功能固定,无法定制化开发;本架构可根据需求扩展功能(如添加温度补偿算法),性价比更高。 |
问题与解决
问题 1:复杂环境下光斑识别困难
解决:1. 硬件上采用 Edmund 窄带滤光片抑制背景杂光,结合巴斯勒相机高灵敏度传感器增强弱光探测;2. 软件上通过 LabVIEW 实现动态阈值算法(基于局部灰度对比度),替代固定阈值,适应光照剧烈变化(照度范围 0~100000lux 均稳定识别)。问题 2:光斑形态不规则导致中心定位偏差
解决:利用 IMAQ 的形态学滤波函数消除噪声后,通过 LabVIEW 编写边界拟合算法,对矩形、椭圆等不规则光斑,采用最小均方误差拟合上下左右边界,中心定位均方误差控制在 0.5 像素内。问题 3:多轴并行测量时数据同步延迟
解决:通过 LabVIEW 的 “同步触发” VI 控制多相机同时曝光,结合 NI 采集卡的硬件触发功能,确保多轴图像采集时间差≤1ms,保证偏差计算的一致性。





楼主最近还看过


官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
