将abb的仿真轨迹转化成实机轨迹的理论方法 点击:532 | 回复:1

一、坐标系
首先,我们需要了解机器人所运用到的坐标系。这里的“坐标系”翻译自frame或者coordinate system。坐标系的轴方向符合右手定则的规定。有如下坐标系:
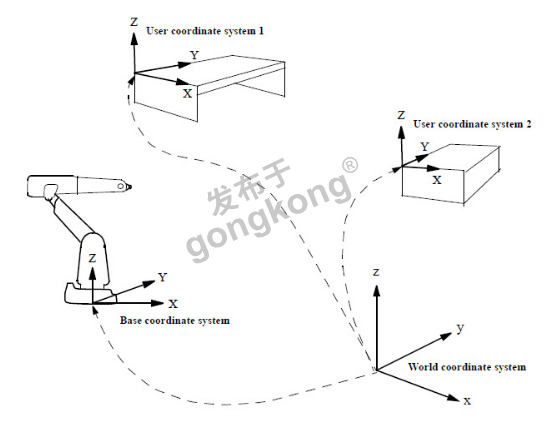
1, 基座坐标系(base coordinate system):又称基本框架。在简单应用中,可通过基座坐标系进行编程。在Motion主题的Robot标签中进行定义。
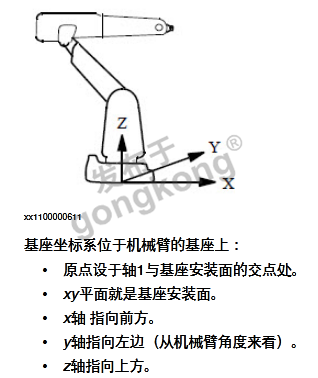
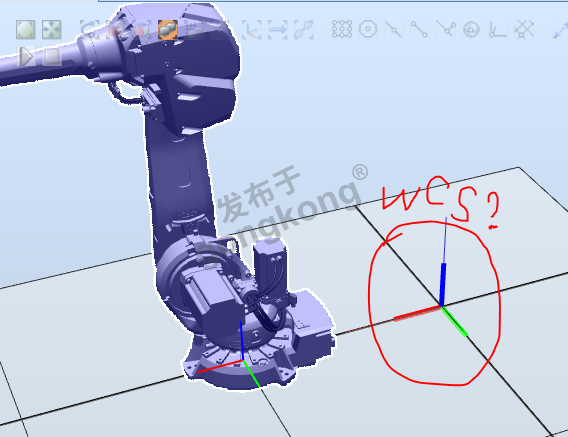
2, 世界坐标系(world coordinate system):又称“公用全局坐标系”。它是车间地板平面上的一个静态点。由预定义的工件数据wobj0进行表示。仿真软件里面的栅格地图的坐标系框架就是世界坐标系。

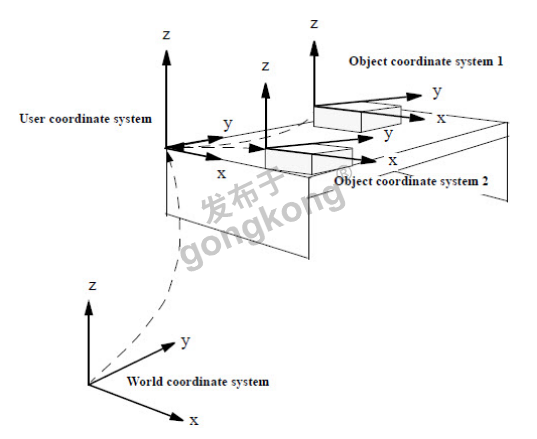
3, 用户坐标系(user coordinate system):在全局坐标系的基础上进行定义。描述固定设备或工作台面的位置。
4, 对象坐标系(object coordinate system):又称工件坐标系,又称目标坐标系。在用户坐标系的基础上进行定义。描述台面上的众多产品或治具。治具释义为直接包裹产品的机械装置。
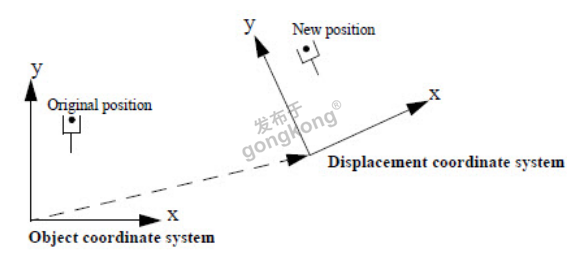
5, 位移坐标系(displacement coordinate system):在工件坐标系的基础上进行定义。描述同一个产品或治具上的众多重复的轨迹曲线或图案。可结合搜索功能弥补单个零件位置的不同。
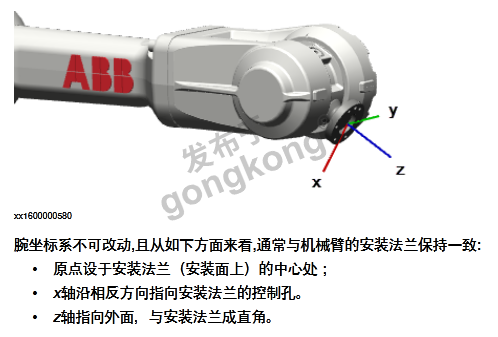
6, 腕坐标系(wrist coordinate system):在简单应用中可用来定义工具的方向。由预定义数据tool0进行表示。
7, 工具坐标系(tool coordinate system):分两种情况:一个是工具安装在机器人手腕上;另一个是工具安装在车间地板或架子台面上。两种情况的具体差异设置在数据类型tooldaData中有详细阐述。由工具中心接触点(TCP)进行表示。
二、机器人位置数据robTarget
位置数据用于定义移动机械臂和附加轴的移动指令中的位置point。即机器人行走过程中的各个点位。更进一步来讲就是当前激活的工具中心接触点TCP在当前活动的目标坐标系object coordinate system中的线性平移与姿态朝向。
三、机器人行驶过程中所需要的关键数据
1, 工具数据(toolData):描述将要用来加工产品的工具的特征,包括TCP的位置与朝向,以及工具本身的物理特性。
2, 工件数据(wobjData):描述机器人执行任务的区域空间。如弧焊台或车架。
3, 负载数据(loadData):描述机器人安装法兰上除开工具的其它重量。如零部件重量或治具重量。基于工件坐标系或工具坐标系进行定义。
四、回到本文的主题
本文的主题用另一种方式描述就是同一个点在不同坐标系框架中的坐标值。
使用指令PoseVect进行计算,如下图所示。
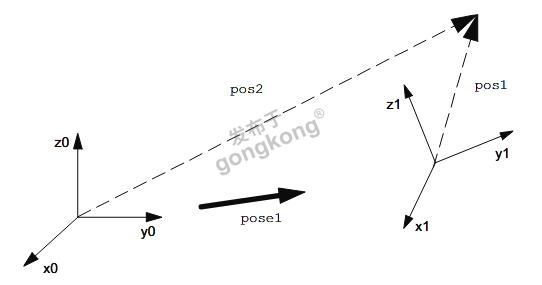
上图中的各个名称的解释:
1, pose1是坐标系1相对于坐标系0的坐标变换关系。如果坐标系0为世界坐标系或者基座坐标系,那么pose1就是坐标系1定义完成后的uframe或者oframe分量。如果坐标系0不为世界坐标系或者基座坐标系,那么就要进行另外一步转换才能得出pose1的值。这一步转换使用PoseMult进行计算,如下图所示。
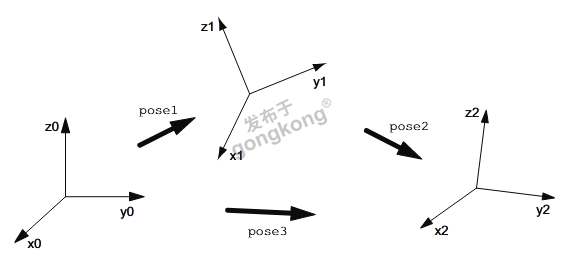
同理,如果上图的坐标系0不是世界坐标系或者基座坐标系,那么就要再次使用PoseMult进行计算。也就是说,一定要让坐标系0为世界坐标系或都基座坐标系,这才能使用最初定义好的工具数据和工件数据。
2, pos1、pos2就是点位在各自坐标系下的坐标值。
五、结语
世界坐标系就是模型仿真画面中的栅格地图的坐标框架。





楼主最近还看过

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
