LabVIEW中显微镜下位移误差的畸变 点击:244 | 回复:0

在显微实验中,位移台通过电机驱动探针进行微米级精确移动,配合显微镜和相机实时观察探针的位置。然而,实验中发现,当电机移动相同的物理距离时,图像中探针的像素位移量存在显著的非线性偏差。经测试,电机的运动精度是准确的,但这种位移误差可能与显微镜相机的光学畸变有关。该问题尤其在依赖图像像素定位的自动化实验中可能引发较大的误差。因此,如何消除或补偿这些畸变误差,确保图像与物理位移的准确映射,成为解决此问题的关键。
本系统采用LabVIEW开发,集成了位移台控制、图像采集与像素分析模块,因此需要在该平台上对问题进行详细分析并提出解决方案。
问题分析
核心原因:相机畸变与非线性映射
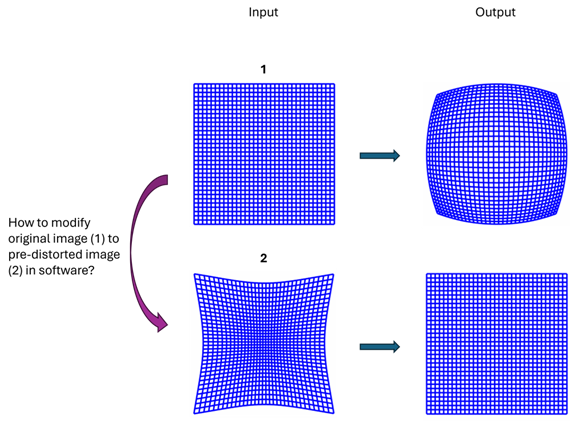
相机畸变:显微镜相机的光学系统可能存在径向畸变(如桶形畸变、枕形畸变)和切向畸变(如镜头倾斜)。这些畸变导致图像边缘区域的像素与实际物理位置的映射关系发生扭曲。
非线性映射:显微镜的放大倍率可能随视野位置变化(例如,物镜边缘与中心的放大率不一致),这意味着像素/微米(px/μm)的换算系数并非全局恒定。图像的不同区域可能会表现出不同的缩放比例,从而导致位移的像素数目和电机实际移动的物理距离不一致。
软件处理误差:图像采集与位移台的同步性不足,或未考虑畸变校正直接使用线性坐标映射,也可能导致像素偏差。
验证实验
固定位移测试:在视野中心与边缘分别记录电机移动相同距离时的像素位移量。如果偏差显著(如边缘位移量减小),则可以证明畸变是影响因素之一。
棋盘格标定:通过标准棋盘格图像量化畸变程度。如果图像中的直线呈现弯曲形态,则可以确认畸变的存在。
解决方案
相机畸变校正
标定流程:
使用棋盘格标定板,采集多角度图像以覆盖整个视野范围。
调用LabVIEW Vision模块中的IMAQ Learn Distortion Model函数,计算畸变参数(如径向系数k1/k2和切向系数p1/p2)。
在后续图像处理中,利用IMAQ Correct Distortion函数对采集的图像进行实时校正,消除畸变对图像像素坐标的影响。
优势:消除光学畸变,提高图像几何精度,使得像素与物理位置之间的映射关系更加准确。
非线性映射建模
数据采集:
将探针移至视野内的多个已知物理坐标点(通过位移台反馈),并记录对应的像素坐标。这些点应覆盖整个视野范围。
通过建立“物理坐标-像素坐标”映射表,量化像素与实际位移之间的非线性关系。
模型构建:
使用LabVIEW的Curve Fitting工具包拟合多项式或插值函数,以描述像素与物理位置之间的映射关系。
也可以使用查找表(LUT)来实现快速的坐标转换,提高处理效率。
同步控制优化
硬件同步:通过LabVIEW的DAQ模块实现位移台运动与图像采集的硬件同步,确保图像采集发生在位移完成后,减少因同步问题导致的误差。
软件补偿:在位移控制算法中,叠加校正后的坐标偏移量,对位移台的控制进行实时调整。
注意事项
标定环境一致性:标定过程必须在与实验相同的光学配置下进行(如物镜倍率、光源强度)。避免环境变化(如温度波动)引起镜头形变或标定参数失真。
标定覆盖范围:标定点需覆盖实验中所有的工作区域,尤其是边缘区域,避免因外推误差而影响校正效果。
实时性平衡:畸变校正与坐标映射的计算可能增加系统的负载。在LabVIEW中,优化循环结构(如并行处理图像与运动控制)有助于提升实时性。
定期校准:机械振动、镜头清洁等因素可能影响标定精度,因此建议定期进行标定,以保证系统稳定性。
总结
通过LabVIEW集成相机标定、非线性映射建模与同步控制,可以有效消除显微系统中由于光学畸变和非线性映射造成的位移像素偏差问题。本方案不仅具备理论严谨性,而且具备实际工程应用价值,适用于高精度自动化显微操作场景。通过优化软件算法与硬件配置,能够大幅提升实验精度,避免误差对自动化实验结果的影响,确保显微操作的可靠性与准确性。





楼主最近还看过

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
