手把手教你西门子S7-1500运动控制功能-基础篇 点击:539 | 回复:0

使用S7-1500的运动控制功能,需要学习最基本的PROFINET组态和工艺轴配置。
这是我从网上找到的一个案例,感觉每一步的配置写的很详细,特别适合新手。
这个案例使用的是博能传动AX系列驱动器,S7-1500与驱动器进行PROFINET通信和工艺轴配置。

这个案例我是从他家官网上的PROFINET通信手册里摘录的,感兴趣的可以自己去下载看一下,是很好的学习资料。
https://www.boneng.com/product_AX.htm

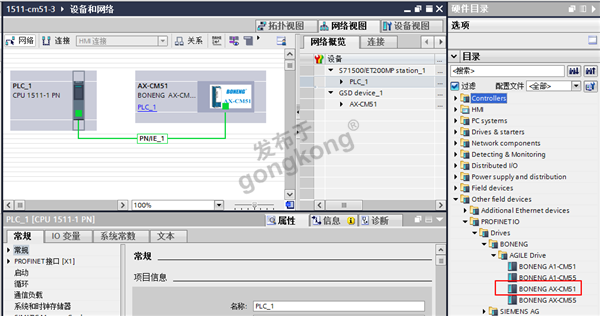
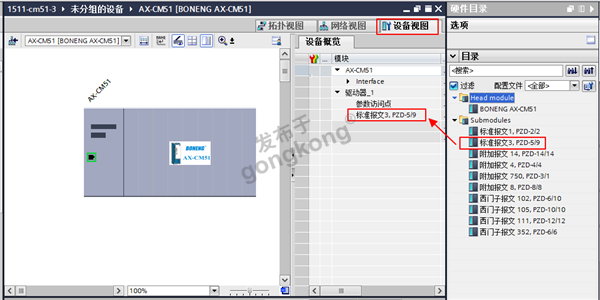
1.首先组态CM51,添加标准3号报文。
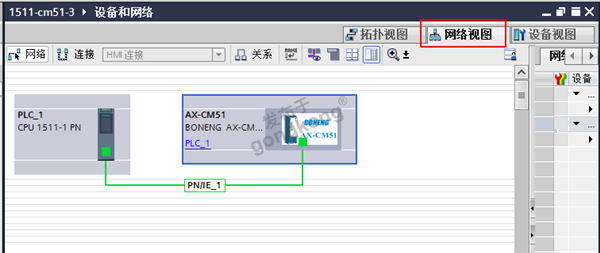
2.在网络视图中将PLC与CM51连接
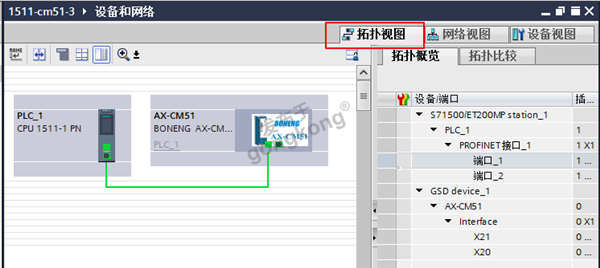
3.若需要PLC与CM51进行IRT通信,则【拓扑视图】必须配置,同时实际的物理连接要与组态一致,若只是进行RT通信(默认),则【拓扑视图】无需配置。
4.在工艺对象中添加定位轴

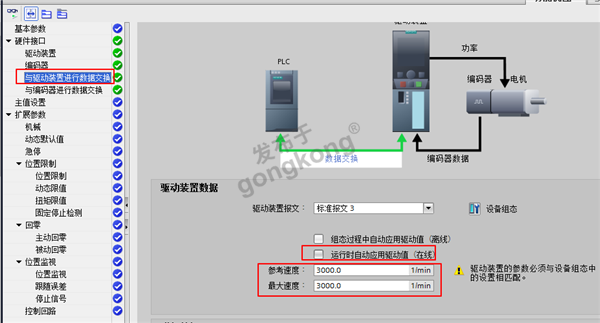
5.在组态配置中选择“PROFIdrive”和“标准报文3”

6.配置编码器类型为绝对值

7.对于电机的参考速度、最大速度以及基准扭矩不能勾选“运行时自动应用驱动器值”,需要根据驱动器参数手动设置。参考速度为电机的额定转速【D00.05 马达额定转速】,最大速度【D00.06 马达最大转速】*【D00.05 马达额定转速】
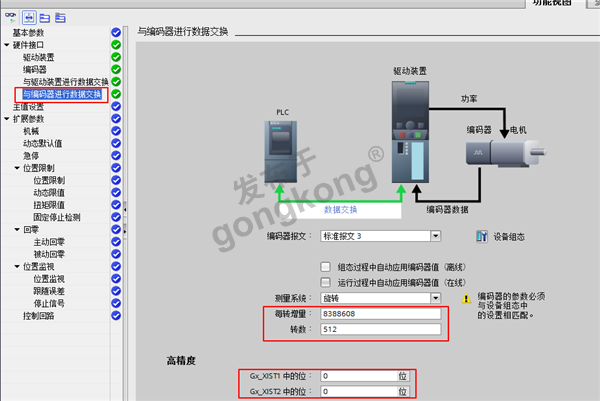
8.在“与编码器进行数据交换”这块,取消勾选“运行过程中自动应用编码器值”
【D02.00 编码器类型】为5:RS485通信编码器(1623),【G00.66 编码器位置反馈模式选择】为1:绝对位置模式。按下图配置。
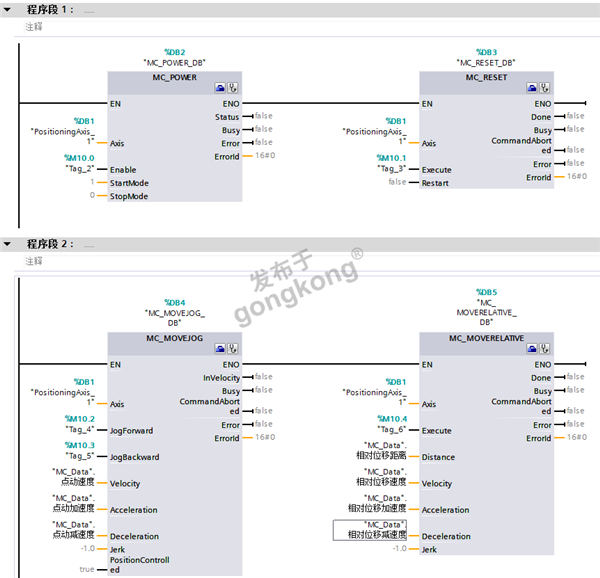
9.编写MC程序。
MC_POWER:给驱动器使能
MC_RESET:给驱动器故障复位
MC_MOVEJOG:点动运行
MC_MOVEVELOCITY:是给定速度运行
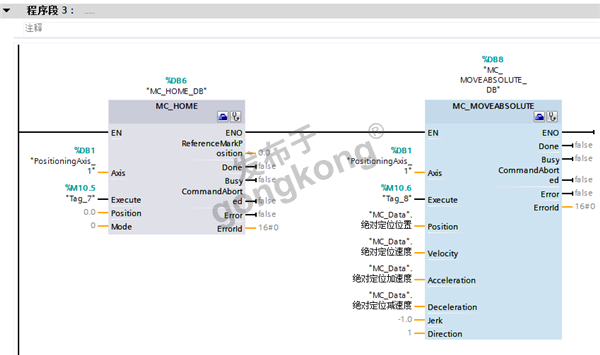
MC_HOME:执行回原
MC_MOVEABSOLUTE:运行绝对定位
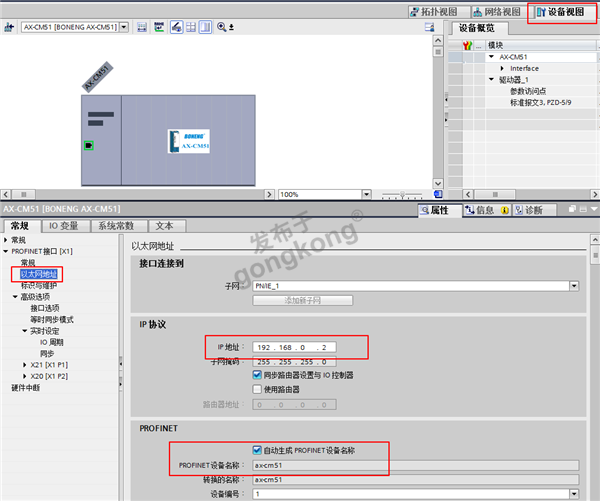
10.接着在设备视图中双击AX-CM51驱动器,为驱动器设置IP地址与设备名
11.下载PLC程序,下载完成后监控PLC有无报错,如果PLC报错,且驱动器【C05.01 通信状态】为0:未建立通信,则需要在设备视图中右键AX-CM51,选择分配设备名称。

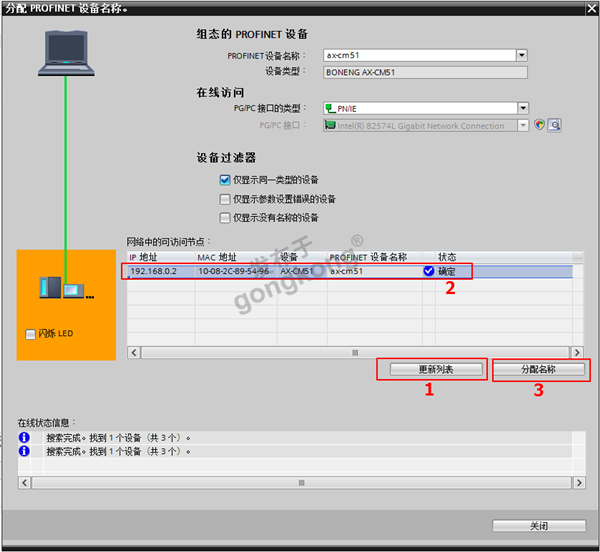
12.最后将设备名称分配给AX-CM51,先点击“更新列表”,选择要分配的驱动器,然后点击“分配设备名称”完成之后可以再点击以下“更新列表”,观察设备名称是否已经修改完成,同时查看驱动器以及PLC错误状态是否消除。
选中驱动器后,勾选“闪烁LED”,对应的驱动器LAN灯会同红绿灯交替闪烁,以帮助用户确定当前搜索到的设备是哪一台。
13.至此标准报文3组态配置以及编程全部完成。






官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
