LabVIEW机械臂控制与图像处理示教平台 点击:96 | 回复:0

LabVIEW机械臂控制与图像处理示教平台
随着工业自动化技术的快速发展,工业机器人在制造业中的应用越来越广泛,它们在提高生产效率、降低人工成本以及保证产品质量方面发挥着重要作用。然而,传统的工业机器人编程和操作需要专业知识,给相关人员的培训和机器人的普及应用带来了不少障碍。为了解决这些问题,开发了一种基于LabVIEW的机械臂控制与图像处理示教平台,旨在提供一个更为直观、易学易用的机器人编程和操作环境,通过图形化编程和人机交互设计,降低学习成本,提高工作效率。
为了应对工业机器人技术发展中的挑战,尤其是在人机交互和教学示教方面。传统机器人的使用和编程难度较大,需要长时间的学习和培训。因此,设计了一种基于LabVIEW的机械臂控制与图像处理示教平台,该平台结合了拖动示教和图像处理功能,不仅简化了机器人的编程和操作流程,还通过集成图像处理功能,拓宽了机器人的应用范围,提高了其在教学、科研以及实际应用中的实用性和灵活性。
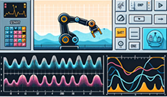
系统的整体设计包括硬件和软件两大部分。硬件方面,选用了六自由度的机械臂,搭配STM32控制板和LDX系列数字舵机,构建了机械臂的控制系统。选择这些硬件的原因主要是考虑到其性能稳定、支持的舵机数量多,以及易于实现复杂动作控制的需求。软件方面,系统采用LabVIEW作为主控软件平台,结合MATLAB GUI进行图像处理。LabVIEW的图形化编程环境大大降低了编程的复杂度,提高了开发效率,而MATLABGUI的加入则使得图像处理功能更加强大、操作更加便捷。
系统通过LabVIEW平台实现了机械臂的拖动示教和图像处理两大功能。拖动示教功能通过调整界面上滑块的位置来改变舵机的角度,实现对机械臂的精确控制,用户可以通过直观的操作来设计机械臂的动作序列。图像处理功能则利用MATLAB GUI设计了一系列的图像处理算法,包括图像变换、增强、滤波等,用户可以通过简单的点击来执行复杂的图像处理任务,这些功能的实现大大提高了机械臂在各种应用场景下的适应性和实用性。
系统的性能指标主要包括机械臂的运动精度、响应速度以及图像处理的准确率和处理速度。为了满足这些系统要求,选用了精度高、响应快的数字舵机,并优化了控制算法以减少延迟,提高响应速度。图像处理部分则通过高效的算法设计,确保了处理速度和准确率。
LabVIEW和MATLAB GUI的结合不仅使得系统操作简便,而且扩展了机械臂的应用范围,从简单的拖动示教到复杂的图像处理应用,都能够轻松实现。此外,系统设计还考虑了用户界面的友好性,使得操作者即使没有太多的专业知识也能够快速上手,有效地提升了学习效率和工作效率。
基于LabVIEW的机械臂控制与图像处理示教平台的设计,实现了机械臂编程和操作的简化,同时提供了强大的图像处理功能,对于教学、科研以及工业应用都具有重要的意义。未来,该平台的进一步完善和优化将使其在更多领域展现出更大的应用潜力。






官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
