LabVIEW开发气动悬浮系统教学平台 点击:42 | 回复:0

LabVIEW开发气动悬浮系统教学平台
目前,通过使用可编程逻辑控制器,几乎可以实现任何工业生产过程的自动化。工业自动化可以提高流程效率,提高生产水平并减少损失。
在此背景下,介绍了工业自动化教育系统的设计和实现以及气动悬浮过程中的控制应用。该自动化系统基于PLCS7-1500和LabVIEW中设计的人机界面,用于监测气动悬浮系统的位置。
控制工程中的一个重要分析是PID控制器的基本原理及其不同的调谐技术。为此,设计和实施了工厂气动悬浮系统,同时考虑到其构造的不同物理方面,例如重量和材料类型。分析了其他因素,例如位置传感器的类型,控制轴向风扇的执行器,管的直径和支撑底座的尺寸。自动化模块基于S7-1500可编程控制器构建了一个气动悬浮系统,以与自动化模块交互并开发自动控制领域的实践。
自动化模块主要由以下组件组成。
• 1个控制单元(PLCS7-1500+开关)
• 3个控制和信号单元
• 1个具有24vdc和10vdc输出的电源
• 1个带数字仪表的控制面板
• 1变频驱动器
• 1继电器模块
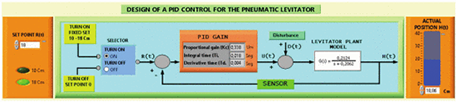
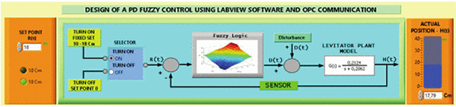
气动悬浮控制系统的框图如图3所示。设计了两种类型的控制器(PID和PD-fuzzy)来分析每种控制器稳定工厂的性能。LabVIEW设计了一个SCADA系统,用于实现PID和PD模糊控制器。
系统的建立时间约为3.5s。此外,输出过冲百分比约为4.78%。输出的参考跟踪误差为0.86cm。由于管内悬挂物体的振动,工厂出现的过冲会影响系统的稳定性。对不同的比例增益值进行了实验测试Kp在PID控制器中,获得了以下效果。
• 提高系统响应速度。
• 减少系统的稳态误差。
• 系统不稳定性增加。
在PD模糊控制器中,控制系统的隶属函数取决于设计人员的经验和过程知识。在PD模糊控制器中,有关于时间和输入参考变化的位置数据。为了获得有利的结果,建议考虑:
• 控制系统的响应速度取决于工厂的灵活性和系统中可以包含的规则数量。
• 一些因素对控制器的性能很重要,例如要悬浮的物体的重量和亚克力管的内部缺陷。
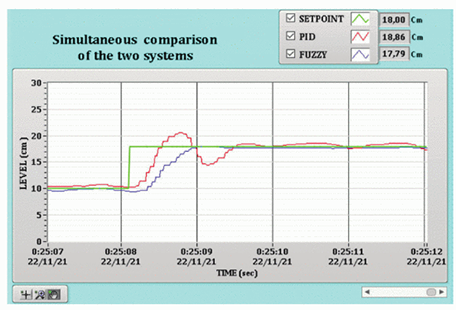
PD模糊控制器比PID控制器具有更好的性能,因为它具有更短的建立时间并且没有过冲,如下图所示。
控制器响应表明,PD模糊控制器的建立时间约为1.5s,PID控制器的建立时间为3s。这意味着PD模糊控制器需要一半的时间来稳定工厂。稳定时间会受到圆柱体内物体开始悬浮延迟的影响。这是因为气压必须达到最小值才能破坏要悬挂的物体的惯性。PD模糊控制器的响应比PID控制器更平滑,因为它不会出现过冲。
这是LabVIEW的一个功能介绍,更多的使用方法与开发案例,欢迎登录官网,了解更多信息。有需要LabVIEW项目合作开发,请与我们联系。





楼主最近还看过

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
