EtherCAT运动控制器进行自定义API封装例程 点击:2642 | 回复:2

发表于:2023-08-28 15:50:53
楼主
本节课程我们主要讲解一下正运动API函数封装原理以及自定义API封装例程。
正运动技术运动控制器均使用统一的API接口


以下为各个功能部分API指令一览表;

2、控制器信息获取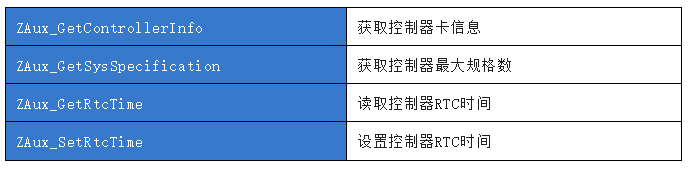
3、基本轴参数设置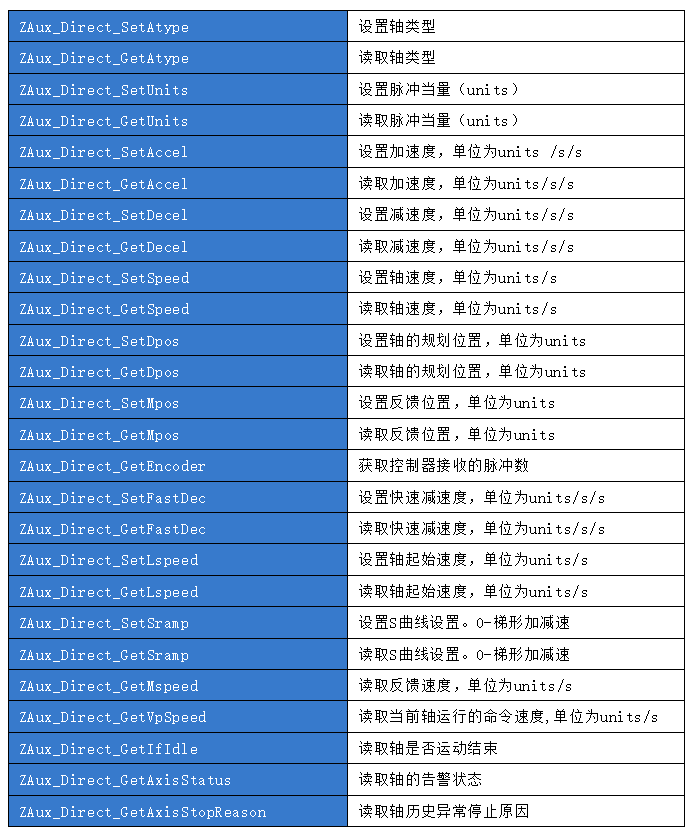
4、基本运动控制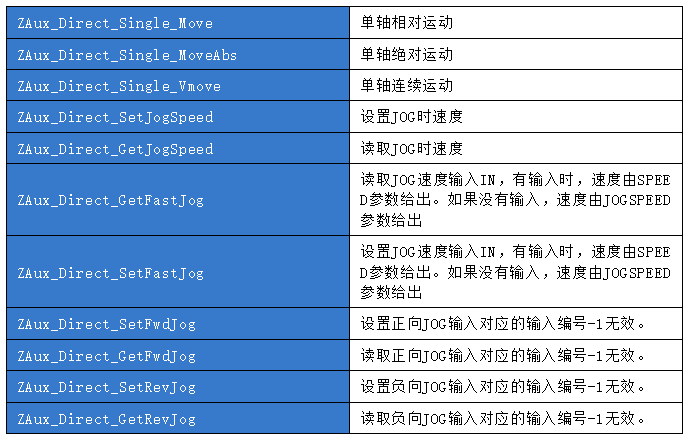
5、VR寄存器

7、Modbus寄存器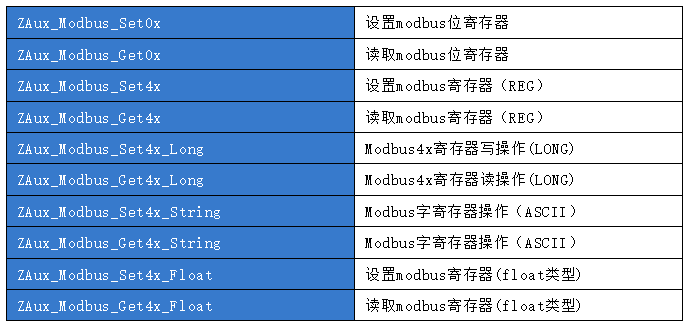
8、Flash/文件读写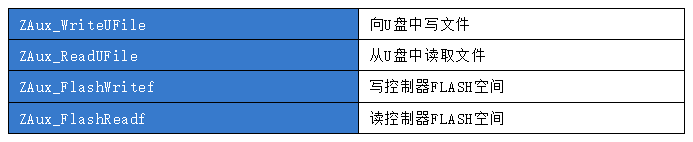
更多API接口详情可以参考“ZMotion PC函数库编程手册 V2.1.1”。
如果想了解更多内容,请点击《全国产EtherCAT运动控制边缘控制器(二):统一的上位机API接口》继续往下看更详细的内容。





楼主最近还看过

发表于:2023-08-28 15:51:10
1楼
点击正运动技术官网:www.zmotion.com.cn 或拨打 400-089-8936 获取更多学习资料和产品资料
——更多精彩内容请关注“正运动小助手”公众号
——更多精彩产品视频介绍请关注“正运动技术”抖音号
热门招聘
相关主题

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
