【KEWEI】科威经济型LP3系列可编程控制器使用说明 点击:606 | 回复:0

发表于:2023-08-03 18:17:32
楼主
一、运动控制模型
LP3系列PLC是以“运动指令”为方法、“轴”为载体、“PLC 梯形图语言”为手段三者结合实现一个或者多个运动对象的控制。
一个运动对象的控制涉及输入到输出,输入是对运动指令的配置以及调用,输出是调用的运动指令通过 控制器硬件端口以脉冲的形式输出到被控的执行机构,运动指令的输入配置以及输出指定是以“轴”为中间载体进行连接的,以 PLC 梯形图语言实现的。
载体“轴”包含输入轴(软件输入虚拟轴和硬件输入实轴)、输出轴(软件虚拟输出轴和硬件输出实轴),如果将输出轴的软件虚拟轴同硬件输出轴进行绑定,那么软件虚拟输出轴所调用的运动指令最终将以脉冲的形式通过硬件输出轴输出到被控的执行机构。

1、运动参数概念
主要介绍和定义运动指令涉及到的相关概念,包括运动指令、输入轴、输出轴、虚拟轴、数字轴、实轴、事件等相关概念。
(1.1)运动指令
LP3系列PLC的运动指令分为三大部分,分别为轴参数指令、高速计数指令、单轴基本指令,详细指令和作用如下图。

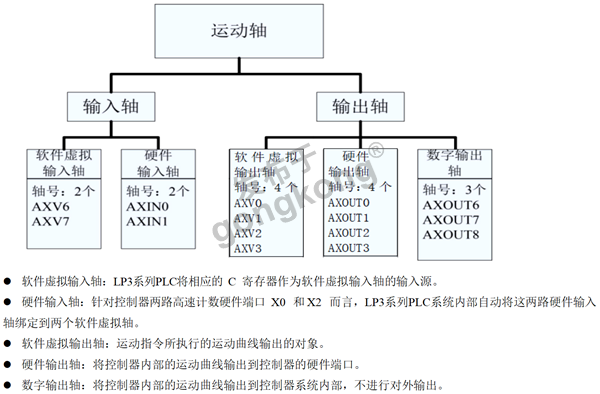
(1.2)运动轴
LP3系列PLC的运动轴分为两大部分,分别为输入轴、输出轴, LP3系列PLC相关的轴定义如下图。
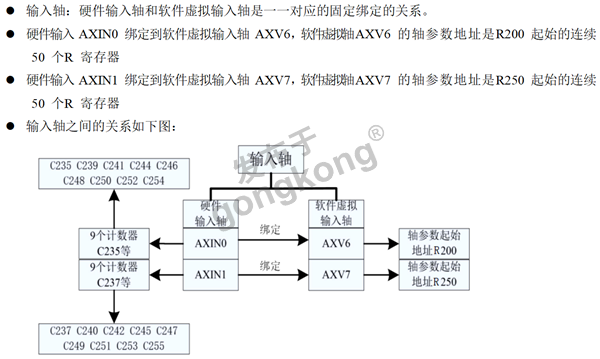
(1.3)运动轴之间的绑定关系
本小节主要介绍 LP3系列PLC的运动轴之间的绑定关系。

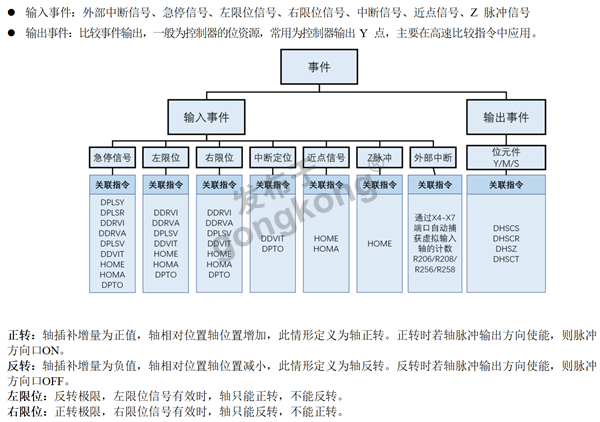
(1.4)运动指令事件
控制器虚拟输出轴在执行运动过程中可以被外部输入事件中断或者输出高速事件控制外部执行机构。
(1.5)硬件轴输入输出频率
LP3系列 PLC 2 路硬件输入轴和 4 路硬件输出轴都有对应的最高频率限制。
.jpg")
.jpg")






楼主最近还看过
热门招聘
相关主题

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
