LabVIEW开发基于神经网络的自动汽车制动系统 点击:282 | 回复:0

完美的停车是世界上司机,尤其是新司机面临的主要问题之一。随着汽车数量的增加,停车位也越来越小。这些较小的空间增加了汽车在停车操作中撞到其他汽车的风险。目前使用蜂鸣器指示距离的趋势并不像大多数驾驶员希望的那样敏感,而且它们经常被忽略。因此,需要一种替代方案来防止这些小碰撞。
最近已经开发出防止汽车碰撞的技术,但它仅适用于高速状态下的汽车。该项目将采用这一概念并将其应用于更常见的应用,即停车。当汽车进入倒车模式时,后保险杠上的超声波传感器启动的过程被激活。它将检测后面的障碍物并激活汽车制动器改变压力,直到汽车最终停止。
最近,福特汽车公司提出了“主动停车辅助”,它可以自动停车,驾驶员甚至不需要触摸方向盘。该系统的一些缺点是系统可能会拒绝将车停在狭窄的空间上。有些人还抱怨说,在将方向盘留给汽车的同时,不得不控制油门和刹车,这令人不安。项目更侧重于作为附加组件的系统。附加组件将更便宜,相对容易由汽车改装店安装。
ANN架构与学习算法
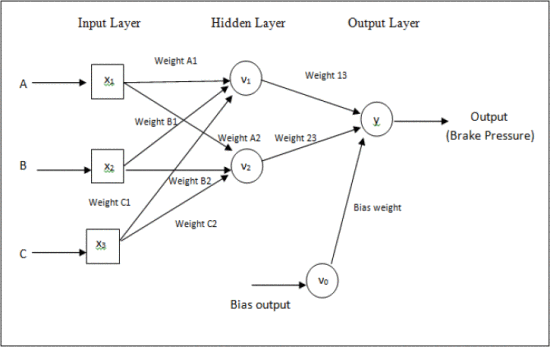
根据该算法,已经计算了几个权重,但计算最多只能达到小数点后五位。训练将用于进一步降低输出的误差幅度。
为了获得所需的输出,系统需要学习根据给定输入生成输出所需的调整。调整是使用反向传播方法完成的,并且不断调整权重,以便在误差时产生最小的量。
经测试左右传感器检测到障碍物但后部传感器未检测到障碍物时的模拟输出。系统的输出为0.5071,与预期值0.5相差不远。
两个相邻传感器检测到障碍物时的模拟输出。两者可以是左和中心以及右和中心。这两种情况都会产生相同的输出结果。产生的输出为0.748,而所需的输出为0.750。
当所有三个传感器检测到障碍物时的模拟输出。本例所需的输出为1,仿真显示网络能够产生0.98的输出。
虽然上述情况可能不符合正常的实际用法,但它确实产生了可以看到和理解的结果。通过训练系统以满足预期的目的,可以产生不同的、更好的结果。这是LabVIEW的一个应用,更多的开发案例,欢迎登录北京瀚文网星官网,了解更多信息。有需要LabVIEW项目合作开发,请与我们联系。





楼主最近还看过
- 哪位知道OSI软件公司(生产PI...
 [3882]
[3882] - 谁有RSEmulate500这个软件啊[2055]
- 三相异步电动机Y/△换接启动控...[2113]
- 求助:wincc如何用C脚本实现窗...[13751]
- 求助 SIMATIC Prosave V9.0...[2181]
- 组太王组合图素制图[2030]
- 组态王和S7200的通讯问题...[2919]
- eplan p8改变导线颜色时有一...[9845]
- 用单片机自制PLC软件大全[2573]
- 关于WINCC自动退出激活系统[2419]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
